当前位置:
X-MOL 学术
›
Int. J. Mech. Sci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-03-01 , DOI: 10.1016/j.ijmecsci.2020.106181 Wei Wang , Yunxi Tang , Cong Li
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-03-01 , DOI: 10.1016/j.ijmecsci.2020.106181 Wei Wang , Yunxi Tang , Cong Li
|
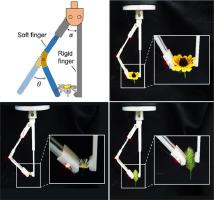
Abstract Integrating flexible sensors into a soft finger is a common approach to control the deformation of the finger. However, adding sensors, especially sensors with a degree of stiffness, sacrifices the overall compliance of the finger structure and increases the complexity of fabrication and control. This study provides an alternative approach, without the need for integrated sensors, to control the deformation of a shape memory alloy (SMA)-based soft planar gripper for grasping deformable objects. The gripper consists of one soft finger which is an SMA-based hinge actuator capable of producing hinge-like bending deformation. The composed soft finger can automatically achieve the desired deformation by introducing a closed-loop PID control system. A camera as a vision sensor, instead of integrated flexible sensors, was used to detect the bending deformation of the soft finger in real-time. With the feedback from the camera, the PID controller was implemented in a microcontroller with designed external circuits, to enable the soft finger to reach any targeted bending angles within its deformation range, according to the size of the manipulated object. As a demonstration, the soft planar grippers with the desired deformation were eventually used to grip deformable objects, including flowers and a panicle. Without the need for material characterization and analytical models, the proposed method can also be extended to other soft planar grippers based on different actuation techniques.
中文翻译:

控制基于形状记忆合金的软平面夹具的弯曲变形以夹持可变形物体
摘要 将柔性传感器集成到软手指中是控制手指变形的常用方法。然而,增加传感器,尤其是具有一定刚度的传感器,会牺牲手指结构的整体柔顺性,并增加制造和控制的复杂性。这项研究提供了一种替代方法,无需集成传感器,以控制基于形状记忆合金 (SMA) 的软平面夹具的变形,以抓取可变形物体。夹持器由一个柔软的手指组成,它是一个基于 SMA 的铰链执行器,能够产生类似铰链的弯曲变形。通过引入闭环PID控制系统,复合软手指可以自动实现所需的变形。作为视觉传感器的相机,而不是集成的柔性传感器,用于实时检测软手指的弯曲变形。借助来自摄像头的反馈,PID 控制器在具有设计外部电路的微控制器中实现,使软手指能够根据被操纵物体的大小在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。根据操作对象的大小,使软手指在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。根据操作对象的大小,使软手指在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。
更新日期:2021-03-01
中文翻译:
控制基于形状记忆合金的软平面夹具的弯曲变形以夹持可变形物体
摘要 将柔性传感器集成到软手指中是控制手指变形的常用方法。然而,增加传感器,尤其是具有一定刚度的传感器,会牺牲手指结构的整体柔顺性,并增加制造和控制的复杂性。这项研究提供了一种替代方法,无需集成传感器,以控制基于形状记忆合金 (SMA) 的软平面夹具的变形,以抓取可变形物体。夹持器由一个柔软的手指组成,它是一个基于 SMA 的铰链执行器,能够产生类似铰链的弯曲变形。通过引入闭环PID控制系统,复合软手指可以自动实现所需的变形。作为视觉传感器的相机,而不是集成的柔性传感器,用于实时检测软手指的弯曲变形。借助来自摄像头的反馈,PID 控制器在具有设计外部电路的微控制器中实现,使软手指能够根据被操纵物体的大小在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。根据操作对象的大小,使软手指在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。根据操作对象的大小,使软手指在其变形范围内达到任何目标弯曲角度。作为演示,具有所需变形的柔软平面夹具最终被用于夹持可变形物体,包括花朵和圆锥花序。无需材料表征和分析模型,所提出的方法也可以扩展到其他基于不同驱动技术的软平面夹具。










































 京公网安备 11010802027423号
京公网安备 11010802027423号