Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2020-10-31 , DOI: 10.1016/j.sna.2020.112398 Xinjun Sheng , Haipeng Xu , Ningbin Zhang , Ningyuan Ding , Xiangyang Zhu , Guoying Gu
|
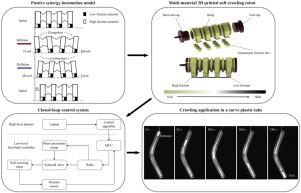
Due to large shape-changing ability and high adaptability, soft crawling robots become a promising candidate in applications with unpredictable terrain and complex environments. However, designing and fabricating of soft crawling robots with hybrid soft and rigid components are still elusive. Here, we present a novel caterpillar inspired pneumatically-driven soft crawling robot, which can be directly 3D printed with multiple materials and without complex assembling process. To mimic the biological structure and morphological locomotion of caterpillars, we design the soft crawling robot with a pneumatically driven bellow-type body, 12 anisotropic frictional feet, and two end caps, and introduce a passive synergy locomotion model between the crawling robot’s body and feet. By selecting different cross-section shape of the feet, we characterize the moving performance of soft crawling robots. Finally, we integrate a pneumatic closed-loop control system to drive the soft crawling robots with a periodic gait and demonstrate their motion capability in a curve plastic tube.
中文翻译:
履带式气动爬行机器人和各向异性摩擦支脚的多材料3D打印
由于具有大的变形能力和高度的适应性,软爬行机器人在具有不可预测的地形和复杂环境的应用中成为有希望的候选者。但是,具有柔性和刚性混合组件的软爬行机器人的设计和制造仍然难以实现。在这里,我们介绍了一种新颖的履带式气动气动爬行机器人,该机器人可以直接用多种材料进行3D打印,而无需复杂的组装过程。为了模拟毛虫的生物学结构和形态运动,我们设计了具有气动波纹管型车身,12个各向异性摩擦脚和两个端盖的软爬行机器人,并在爬行机器人的身体和脚之间引入了被动协同运动模型。通过选择脚的不同横截面形状,我们描述了软爬行机器人的运动性能。最后,我们集成了一个气动闭环控制系统,以周期性的步态驱动软爬行机器人,并在弯曲的塑料管中展示了它们的运动能力。










































 京公网安备 11010802027423号
京公网安备 11010802027423号