当前位置:
X-MOL 学术
›
Autom. Constr.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Real-time vision-based worker localization & hazard detection for construction
Automation in Construction ( IF 9.6 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.autcon.2020.103448 Idris Jeelani , Khashayar Asadi , Hariharan Ramshankar , Kevin Han , Alex Albert
Automation in Construction ( IF 9.6 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.autcon.2020.103448 Idris Jeelani , Khashayar Asadi , Hariharan Ramshankar , Kevin Han , Alex Albert
|
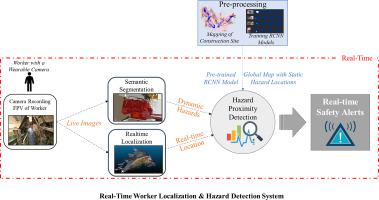
Abstract Despite training, construction workers often fail to recognize a significant proportion of hazards in construction environments. Therefore, there is a need for developing technology that assists workers and safety managers in identifying hazards in complex and dynamic construction environments. This study develops a framework for an automated system that detects hazardous conditions and objects in real-time to assist workers and managers. The framework consists of three independent pipelines for localization of workers, semantic segmentation of the visual scene around workers, and detection of static and dynamic hazards. The framework can be used to automate and augment the hazard detection ability of workers and safety managers in construction workplaces. In addition, the framework offers several computing contributions including an improved real-time worker localization method and an efficient architecture for integrating pipelines for entity localization and object detection. A system developed based on the proposed framework as a proof of concept and was tested in indoor and outdoor construction environments. It achieved over 93% accuracy.
中文翻译:

基于实时视觉的工人定位和施工危险检测
摘要 尽管经过培训,建筑工人往往未能认识到建筑环境中的很大一部分危害。因此,需要开发技术来帮助工人和安全管理人员识别复杂和动态施工环境中的危险。本研究为自动化系统开发了一个框架,该系统实时检测危险情况和物体以协助工人和管理人员。该框架由三个独立的管道组成,用于工人定位、工人周围视觉场景的语义分割以及静态和动态危险的检测。该框架可用于自动化和增强建筑工作场所工人和安全经理的危险检测能力。此外,该框架提供了多种计算贡献,包括改进的实时工作者定位方法和用于集成实体定位和对象检测管道的有效架构。基于提议的框架开发的系统作为概念证明,并在室内和室外施工环境中进行了测试。它达到了超过 93% 的准确率。
更新日期:2021-01-01
中文翻译:
基于实时视觉的工人定位和施工危险检测
摘要 尽管经过培训,建筑工人往往未能认识到建筑环境中的很大一部分危害。因此,需要开发技术来帮助工人和安全管理人员识别复杂和动态施工环境中的危险。本研究为自动化系统开发了一个框架,该系统实时检测危险情况和物体以协助工人和管理人员。该框架由三个独立的管道组成,用于工人定位、工人周围视觉场景的语义分割以及静态和动态危险的检测。该框架可用于自动化和增强建筑工作场所工人和安全经理的危险检测能力。此外,该框架提供了多种计算贡献,包括改进的实时工作者定位方法和用于集成实体定位和对象检测管道的有效架构。基于提议的框架开发的系统作为概念证明,并在室内和室外施工环境中进行了测试。它达到了超过 93% 的准确率。








































 京公网安备 11010802027423号
京公网安备 11010802027423号