当前位置:
X-MOL 学术
›
Int. J. Circ. Theory Appl.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Eliminating the contact bounce of AC contactor based on speed feedback
International Journal of Circuit Theory and Applications ( IF 1.8 ) Pub Date : 2020-10-28 , DOI: 10.1002/cta.2899 Lei Qi 1, 2 , Ming Zong 1 , Xuejie Wang 3, 4
International Journal of Circuit Theory and Applications ( IF 1.8 ) Pub Date : 2020-10-28 , DOI: 10.1002/cta.2899 Lei Qi 1, 2 , Ming Zong 1 , Xuejie Wang 3, 4
Affiliation
|
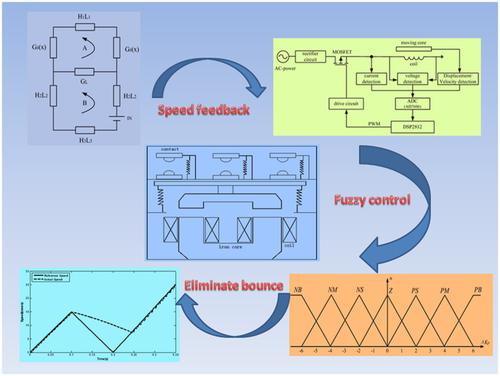
Contactor bounce has a serious impact on its electrical life and closed reliability in the process of closing the main circuit. Controlling the contact movement is one of the effective ways to reduce the bounce effect. In this paper, the contact movement characteristics are concerned directly. A big speed and small acceleration of contact are expected to complete the closure. The mathematical model of the circuit and the magnetic circuit are established, and the dynamic characteristics of the electromagnetic system are analyzed. The closed‐loop control system of contact motion characteristic based on speed feedback is constructed, and the speed tracking effect is improved effectively by fuzzy control. The experiment results showed that the control method proposed is correct, and the actual speed curve of the contact was consistent with the planned motion curve. The contact speed of the contact decreases obviously, which can achieve the goal of restraining the bounce of the contact.
中文翻译:

根据速度反馈消除交流接触器的触点弹跳
在闭合主电路过程中,接触器弹跳对其电气寿命和闭合可靠性产生严重影响。控制接触运动是减少反弹效果的有效方法之一。在本文中,直接关系到接触运动特性。期望大的接触速度和小的加速度来完成闭合。建立了电路和磁路的数学模型,并对电磁系统的动态特性进行了分析。构建了基于速度反馈的接触运动特性闭环控制系统,通过模糊控制有效提高了速度跟踪效果。实验结果表明,所提出的控制方法是正确的,接触器的实际速度曲线与计划的运动曲线一致。触点的接触速度明显降低,可以达到抑制触点弹跳的目的。
更新日期:2020-10-28
中文翻译:
根据速度反馈消除交流接触器的触点弹跳
在闭合主电路过程中,接触器弹跳对其电气寿命和闭合可靠性产生严重影响。控制接触运动是减少反弹效果的有效方法之一。在本文中,直接关系到接触运动特性。期望大的接触速度和小的加速度来完成闭合。建立了电路和磁路的数学模型,并对电磁系统的动态特性进行了分析。构建了基于速度反馈的接触运动特性闭环控制系统,通过模糊控制有效提高了速度跟踪效果。实验结果表明,所提出的控制方法是正确的,接触器的实际速度曲线与计划的运动曲线一致。触点的接触速度明显降低,可以达到抑制触点弹跳的目的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号