当前位置:
X-MOL 学术
›
Int. J. Mech. Sci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Bending analysis and contact force modeling of soft pneumatic actuators with pleated structures
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-03-01 , DOI: 10.1016/j.ijmecsci.2020.106150 Guoliang Zhong , Weiqiang Dou , Xuechao Zhang , Hongdong Yi
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-03-01 , DOI: 10.1016/j.ijmecsci.2020.106150 Guoliang Zhong , Weiqiang Dou , Xuechao Zhang , Hongdong Yi
|
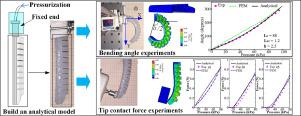
Abstract Soft pneumatic actuators with pleated structures inherently have many advantages, such as low input pressure, high bending speed, and large-amplitude motion, which make them have great potential in the fields of fragile items, medical rehabilitation, and auxiliary assistance. However, modeling and predicting their behavior is a challenge for many researchers due to the discontinuity of pleated structures and the nonlinearity of materials. In this paper, to predict the bending angle and the tip contact force of the soft actuator, several discrete chambers are equivalent to a single chamber within a continuum actuator by using the constant volume principle of elastomer material. On this basis, an analytical model is proposed by introducing the Neo-Hookean hyperelasticity theory, which can derive the relationships of tip contact force of the soft actuator, input pressure, and bending angle. In order to verify the proposed model, seven pleated soft pneumatic actuators with different specifications (actuator length L0, distance between adjacent chambers Ls2, top wall thickness t) are designed and made. And the effectiveness of the proposed model is investigated by multiple physical experiments and finite element method (FEM) simulations. Furthermore, the experimental study shows that the final results successfully demonstrate that the proposed analytical model can predict the bending angle and the tip contact force of the soft actuators well.
中文翻译:

具有褶皱结构的软气动执行器的弯曲分析和接触力建模
摘要 具有褶皱结构的软质气动执行器具有输入压力低、弯曲速度快、运动幅度大等诸多优点,使其在易碎物品、医疗康复、辅助辅助等领域具有巨大潜力。然而,由于褶皱结构的不连续性和材料的非线性,对它们的行为进行建模和预测对许多研究人员来说是一个挑战。在本文中,为了预测软致动器的弯曲角和尖端接触力,利用弹性体材料的定容原理,几个离散的腔室等效于连续介质致动器中的单个腔室。在此基础上,引入Neo-Hookean超弹性理论,提出了一个解析模型,可以推导出软执行器的尖端接触力、输入压力和弯曲角度的关系。为了验证所提出的模型,设计并制造了七个不同规格(执行器长度 L0、相邻腔室之间的距离 Ls2、顶壁厚度 t)的折叠式软气动执行器。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。相邻腔室之间的距离 Ls2、顶壁厚度 t) 是设计和制造的。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。相邻腔室之间的距离 Ls2、顶壁厚度 t) 是设计和制造的。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。
更新日期:2021-03-01
中文翻译:
具有褶皱结构的软气动执行器的弯曲分析和接触力建模
摘要 具有褶皱结构的软质气动执行器具有输入压力低、弯曲速度快、运动幅度大等诸多优点,使其在易碎物品、医疗康复、辅助辅助等领域具有巨大潜力。然而,由于褶皱结构的不连续性和材料的非线性,对它们的行为进行建模和预测对许多研究人员来说是一个挑战。在本文中,为了预测软致动器的弯曲角和尖端接触力,利用弹性体材料的定容原理,几个离散的腔室等效于连续介质致动器中的单个腔室。在此基础上,引入Neo-Hookean超弹性理论,提出了一个解析模型,可以推导出软执行器的尖端接触力、输入压力和弯曲角度的关系。为了验证所提出的模型,设计并制造了七个不同规格(执行器长度 L0、相邻腔室之间的距离 Ls2、顶壁厚度 t)的折叠式软气动执行器。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。相邻腔室之间的距离 Ls2、顶壁厚度 t) 是设计和制造的。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。相邻腔室之间的距离 Ls2、顶壁厚度 t) 是设计和制造的。并且通过多个物理实验和有限元方法(FEM)模拟来研究所提出模型的有效性。此外,实验研究表明,最终结果成功地证明了所提出的分析模型可以很好地预测软致动器的弯曲角度和尖端接触力。








































 京公网安备 11010802027423号
京公网安备 11010802027423号