Computers in Industry ( IF 10.0 ) Pub Date : 2020-10-26 , DOI: 10.1016/j.compind.2020.103326 Ting Lei , Youmin Rong , Hui Wang , Yu Huang , Min Li
|
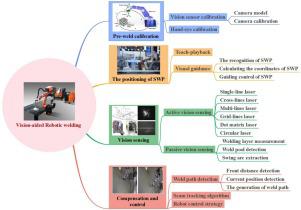
Vision-aided robotic welding has been applied in the industrial field for decades. This paper summarizes the procedures of vision-aided robotic welding. Various methods in vision sensor calibration and hand-eye calibration have been illustrated. The recognition, calculation and guidance control are the basic stages of visual positioning for SWP (start welding point). Various groove types (I-groove, V-groove, Y-groove, U-groove etc.) and joint types (butt joint, lap joint, fillet joint, T-joint etc.) can be detected by six active vision sensing methods and three passive vision sensing methods. Weld path detection, tracking algorithm and control strategy are the necessary procedures to realize seam tracking. Various seam trajectories (straight line, zig-zag, sine, half-moon, pipe curve, spatial curve etc.) can be compensated by several common control methods (PID control, fuzzy control, iterative learning control, trajectory-based control etc.). The selection of control method is determined by weld path detection and seam tracking algorithm. In the end, the future development of vision-aided robotic welding has also been presented.
中文翻译:
视觉辅助机器人焊接综述
视觉辅助机器人焊接已在工业领域应用了数十年。本文总结了视觉辅助机器人焊接的过程。已经示出了视觉传感器校准和手眼校准中的各种方法。识别,计算和引导控制是SWP(起始焊接点)视觉定位的基本阶段。可通过六种主动视觉检测方法检测各种凹槽类型(I形槽,V形槽,Y形槽,U形槽等)和接头类型(对接接头,搭接接头,圆角接头,T形接头等)和三种被动视觉感应方法。焊缝检测,跟踪算法和控制策略是实现焊缝跟踪的必要步骤。各种接缝轨迹(直线,锯齿形,正弦,半月形,管形曲线,空间曲线等))可通过几种常见的控制方法(PID控制,模糊控制,迭代学习控制,基于轨迹的控制等)进行补偿。控制方法的选择由焊接路径检测和焊缝跟踪算法决定。最后,还介绍了视觉辅助机器人焊接的未来发展。


























 京公网安备 11010802027423号
京公网安备 11010802027423号