当前位置:
X-MOL 学术
›
Int. Trans. Electr. Energy Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A Lyapunov function theory‐based nonlinear control strategy for NPC‐type three‐level unified power quality conditioner
International Transactions on Electrical Energy Systems ( IF 1.9 ) Pub Date : 2020-10-21 , DOI: 10.1002/2050-7038.12638 Jianqiao Ye 1 , Jianping Zhou 1 , Dajun Mao 1 , Xiangyi Ge 1 , Jian Zhang 1 , Le Fang 1
International Transactions on Electrical Energy Systems ( IF 1.9 ) Pub Date : 2020-10-21 , DOI: 10.1002/2050-7038.12638 Jianqiao Ye 1 , Jianping Zhou 1 , Dajun Mao 1 , Xiangyi Ge 1 , Jian Zhang 1 , Le Fang 1
Affiliation
|
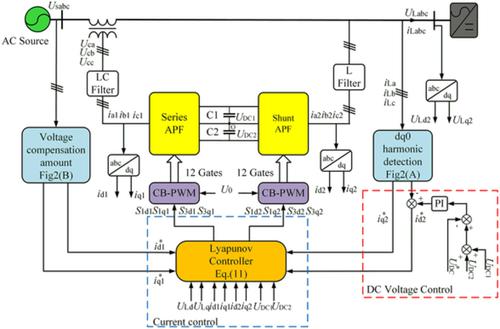
Classic control methods commonly used for a unified power quality conditioner (UPQC) include the following: proportional integral (PI) control, proportional resonance (PR) control, and repetitive control. Generally, the main weaknesses of these control methods are poor compensation accuracy and low response speed. In this article, in order to enhance the overall performance of the system, we introduce an innovative nonlinear control strategy based on the Lyapunov function for the three‐phase three‐wire neutral‐point clamp (NPC) type three‐level UPQC. We first develop the mathematical UPQC model, then obtain from the model the control law which we use to construct the switching function by creating the Lyapunov function, thus avoiding the introduction of closed‐loop feedback. The suggested strategy also achieves system stability and dynamic performance by selecting appropriate parameters, after which a carrier‐based pulse width modulation control method based on the injected zero‐sequence component is applied to maintain the stability and balance of the DC‐side capacitor voltage. In addition, both numerical simulation and comparison of experimental results using traditional PI control, passivity‐based control methods, and sliding mode control shows that the proposed nonlinear control strategy for three‐phase three‐wire NPC type three‐level UPQC has an excellent response speed and compensation efficiency.
中文翻译:

基于Lyapunov函数理论的NPC型三级统一电能质量调节器的非线性控制策略
统一电能质量调节器(UPQC)常用的经典控制方法包括:比例积分(PI)控制,比例谐振(PR)控制和重复控制。通常,这些控制方法的主要缺点是补偿精度差和响应速度低。在本文中,为了增强系统的整体性能,我们针对三相三线中性点钳位(NPC)型三电平UPQC引入了基于Lyapunov函数的创新非线性控制策略。我们首先开发数学UPQC模型,然后通过创建Lyapunov函数从模型中获得用于构造开关函数的控制律,从而避免引入闭环反馈。建议的策略还可以通过选择适当的参数来实现系统稳定性和动态性能,然后采用基于注入零序分量的基于载波的脉宽调制控制方法来维持DC侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。之后,基于注入的零序分量的基于载波的脉宽调制控制方法被应用,以保持直流侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。此后,基于注入的零序分量的基于载波的脉冲宽度调制控制方法被应用,以保持直流侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。
更新日期:2020-12-07
中文翻译:
基于Lyapunov函数理论的NPC型三级统一电能质量调节器的非线性控制策略
统一电能质量调节器(UPQC)常用的经典控制方法包括:比例积分(PI)控制,比例谐振(PR)控制和重复控制。通常,这些控制方法的主要缺点是补偿精度差和响应速度低。在本文中,为了增强系统的整体性能,我们针对三相三线中性点钳位(NPC)型三电平UPQC引入了基于Lyapunov函数的创新非线性控制策略。我们首先开发数学UPQC模型,然后通过创建Lyapunov函数从模型中获得用于构造开关函数的控制律,从而避免引入闭环反馈。建议的策略还可以通过选择适当的参数来实现系统稳定性和动态性能,然后采用基于注入零序分量的基于载波的脉宽调制控制方法来维持DC侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。之后,基于注入的零序分量的基于载波的脉宽调制控制方法被应用,以保持直流侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。此后,基于注入的零序分量的基于载波的脉冲宽度调制控制方法被应用,以保持直流侧电容器电压的稳定性和平衡。此外,数值模拟和使用传统PI控制,基于无源控制方法以及滑模控制的实验结果比较均表明,针对三相三线NPC型三电平UPQC提出的非线性控制策略具有出色的响应速度和补偿效率。










































 京公网安备 11010802027423号
京公网安备 11010802027423号