ISA Transactions ( IF 6.3 ) Pub Date : 2020-10-20 , DOI: 10.1016/j.isatra.2020.10.051 Qibing Jin , Wu Cai , Xinghan Du
|
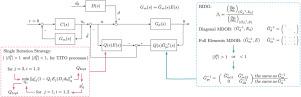
This paper presents a modified multivariable disturbance observer-based (MDOB) control method for stable two-input-two-output (TITO) processes with multiple time delays. Different from the existing MDOB control strategies with diagonal or full elements inverse model, a partially coupled inverse model is used here to provide better disturbance rejection performance. First, an interaction measure, relative input disturbance gain (RIDG), is defined to quantify the disturbance rejection capabilities of the two common types of MDOB techniques. Based on RIDG, the partially coupled inverse model is derived. Then, to deal with the cross terms of the filter elements in the outputs, a single iteration strategy is presented to derive them one by one. Meanwhile, analytical forms of the filter elements are obtained by minimizing the 2-norm of the outputs. Finally, filter parameters are tuned taking into account criteria of performance and robustness. And application of the proposed strategy on simulation examples verifies its effectiveness and superiority.
中文翻译:
基于干扰观测器的具有部分耦合逆模型的控制,用于具有时间延迟的稳定TITO过程
本文提出了一种改进的基于多变量扰动观察者的(MDOB)控制方法,用于具有多个时滞的稳定的二进二出(TITO)过程。与现有的具有对角线或全单元逆模型的MDOB控制策略不同,此处使用部分耦合的逆模型来提供更好的抗干扰性能。首先,定义了一种交互措施,即相对输入干扰增益(RIDG),以量化两种常见类型的MDOB技术的干扰抑制能力。基于RIDG,推导了部分耦合逆模型。然后,为了处理输出中过滤器元素的交叉项,提出了一种单次迭代策略来逐一导出它们。同时,通过使输出的2范数最小化来获得滤波器元件的分析形式。最后,考虑到性能和鲁棒性的标准来调整滤波器参数。将该策略应用于仿真实例验证了其有效性和优越性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号