当前位置:
X-MOL 学术
›
Rob. Auton. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Assist-As-Needed control of a hip exoskeleton based on a novel strength index
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.robot.2020.103667 Naeim Naghavi , Alireza Akbarzadeh , S. Mohammad Tahamipour-Z. , Iman Kardan
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.robot.2020.103667 Naeim Naghavi , Alireza Akbarzadeh , S. Mohammad Tahamipour-Z. , Iman Kardan
|
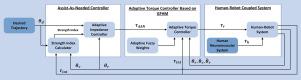
Abstract This paper addresses the challenging concept of Assist-As-Needed control of exoskeleton robots. The proposed controller boosts the voluntary participation of the patient by providing assistance according to the ability of the wearer in performing the assigned task. A novel strength index is presented that combines interaction force and position-tracking error into a single quantity to estimate the physical strength of the wearer during the therapy. The estimated strength is used to adjust the boundaries of a virtual tunnel around the desired trajectory, defined to assume a degree of freedom for the wearer’s motions and to compensate for asymmetric gait patterns. The required assistance is then defined by an adaptive impedance controller according to the distance of the tracking error from the tunnel boundaries. To ensure that the assistance is accurately supplied to the patient, an adaptive torque controller is integrated into the control loop. The adaptive torque controller uses a generalized fuzzy hyperbolic model to compensate for the inherent impedance of the exoskeleton. Simulation results on a hemiplegic model show that the proposed index can estimate the wearer’s strength properly and the proposed assist-as-needed controller can reduce the tracking error. The performance of the proposed method is also evaluated experimentally on a healthy subject wearing a hip exoskeleton. The results verify that the proposed method can be used in a variety of therapeutic applications where it is important to track the desired trajectory with minimum interventions.
中文翻译:

基于新强度指数的髋外骨骼辅助控制
摘要 本文阐述了外骨骼机器人的按需辅助控制这一具有挑战性的概念。所提出的控制器通过根据佩戴者执行指定任务的能力提供帮助来促进患者的自愿参与。提出了一种新的力量指数,将相互作用力和位置跟踪误差结合到一个单一的量中,以估计佩戴者在治疗期间的体力。估计的强度用于调整所需轨迹周围的虚拟隧道的边界,定义为假设佩戴者运动的自由度并补偿不对称的步态模式。然后由自适应阻抗控制器根据跟踪误差与隧道边界的距离来定义所需的辅助。为确保向患者准确提供帮助,自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。
更新日期:2020-12-01
中文翻译:
基于新强度指数的髋外骨骼辅助控制
摘要 本文阐述了外骨骼机器人的按需辅助控制这一具有挑战性的概念。所提出的控制器通过根据佩戴者执行指定任务的能力提供帮助来促进患者的自愿参与。提出了一种新的力量指数,将相互作用力和位置跟踪误差结合到一个单一的量中,以估计佩戴者在治疗期间的体力。估计的强度用于调整所需轨迹周围的虚拟隧道的边界,定义为假设佩戴者运动的自由度并补偿不对称的步态模式。然后由自适应阻抗控制器根据跟踪误差与隧道边界的距离来定义所需的辅助。为确保向患者准确提供帮助,自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。自适应扭矩控制器集成到控制回路中。自适应扭矩控制器使用广义模糊双曲线模型来补偿外骨骼的固有阻抗。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。偏瘫模型的仿真结果表明,所提出的指标可以正确估计佩戴者的力量,并且所提出的按需辅助控制器可以减少跟踪误差。所提出方法的性能也在穿着髋外骨骼的健康受试者身上进行了实验评估。结果证实,所提出的方法可用于各种治疗应用,其中以最少的干预跟踪所需的轨迹很重要。










































 京公网安备 11010802027423号
京公网安备 11010802027423号