当前位置:
X-MOL 学术
›
Mech. Mach. Theory
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Development and characterisation of a controllable adjustable knee joint mechanism
Mechanism and Machine Theory ( IF 4.5 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.mechmachtheory.2020.104101 Michał Olinski , Antoni Gronowicz , Marco Ceccarelli
Mechanism and Machine Theory ( IF 4.5 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.mechmachtheory.2020.104101 Michał Olinski , Antoni Gronowicz , Marco Ceccarelli
|
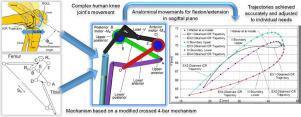
Abstract The paper focuses on the development of a new adjustable knee joint mechanism that can also be used as a device to assist in the rehabilitation of knee joint motion. The mechanism is synthesised and based on a crossed 4-bar linkage in order to reproduce the complex knee joint motion in terms of the flexion/extension movement in the sagittal plane with variable instantaneous centre of rotation (ICR) positions. The mechanism is modified by introducing two additional degrees of freedom, each one in the form of 2-link modules that are moved by rotational motors. Thus, a final new design of the knee joint mechanism is developed and a 3D dynamic model is formulated in ADAMS. Simulations are then conducted on the model in order to characterise the functioning of an optimal solution that considers the degree of compatibility between the trajectories of the ICR of a human reference knee joint and the ICR of the new mechanism. Numerical results are presented with regards to the mechanism's main advantage, i.e. the possibility of achieving several trajectories. This enables the knee joint trajectory to be corrected step by step in real-time and to be adjusted to individual needs.
中文翻译:

可控可调膝关节机构的开发与表征
摘要 本文着眼于开发一种新型的可调节膝关节机构,该机构也可用作辅助膝关节运动康复的装置。该机构是综合的,并基于交叉的 4 杆连杆机构,以便根据矢状面中的屈曲/伸展运动再现复杂的膝关节运动,并具有可变的瞬时旋转中心 (ICR) 位置。该机构通过引入两个额外的自由度进行了修改,每个自由度都采用由旋转电机移动的 2 连杆模块的形式。因此,开发了膝关节机构的最终新设计,并在 ADAMS 中制定了 3D 动态模型。然后对模型进行模拟,以表征最佳解决方案的功能,该解决方案考虑了人体参考膝关节的 ICR 轨迹与新机制的 ICR 之间的兼容性程度。给出了关于该机制的主要优点的数值结果,即实现多个轨迹的可能性。这使得膝关节轨迹能够实时逐步校正并根据个人需求进行调整。
更新日期:2021-01-01
中文翻译:
可控可调膝关节机构的开发与表征
摘要 本文着眼于开发一种新型的可调节膝关节机构,该机构也可用作辅助膝关节运动康复的装置。该机构是综合的,并基于交叉的 4 杆连杆机构,以便根据矢状面中的屈曲/伸展运动再现复杂的膝关节运动,并具有可变的瞬时旋转中心 (ICR) 位置。该机构通过引入两个额外的自由度进行了修改,每个自由度都采用由旋转电机移动的 2 连杆模块的形式。因此,开发了膝关节机构的最终新设计,并在 ADAMS 中制定了 3D 动态模型。然后对模型进行模拟,以表征最佳解决方案的功能,该解决方案考虑了人体参考膝关节的 ICR 轨迹与新机制的 ICR 之间的兼容性程度。给出了关于该机制的主要优点的数值结果,即实现多个轨迹的可能性。这使得膝关节轨迹能够实时逐步校正并根据个人需求进行调整。








































 京公网安备 11010802027423号
京公网安备 11010802027423号