Measurement ( IF 5.2 ) Pub Date : 2020-09-22 , DOI: 10.1016/j.measurement.2020.108472 Mohammed Zinelaabidine Ghellab , Samir Zeghlache , Ali Djerioui , Loutfi Benyettou
|
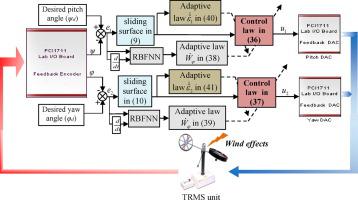
In this paper, an Adaptive RBFNN global fast dynamic terminal sliding mode control (ARBFNNGFDTSMC) is designed to situate the main and tail angles of a twin rotor MIMO system (TRMS). The control objective is to stabilize the TRMS in a reference position or follow a predefined trajectory. An adaptive RBFNN has been used in order to identified unknown nonlinear dynamics of the TRMS. In addition, another adaptive control expressions has been added to diminish the wind gusts, external disturbance effects, and to compensate the estimation errors of the adaptive RBFNN. Moreover, the stability analysis in closed-loop is assured by using Lyapunov method. The developed controller is applied to the TRMS with cross coupling between tail and main subsystems without decoupling procedure. Experimental results prove the good control tracking performance in presence of wind gusts and external disturbances.
中文翻译:
双转子MIMO系统抗风影响的自适应RBFNN全局快速动态终端滑模控制的实验验证。
本文设计了一种自适应RBFNN全局快速动态终端滑模控制(ARBFNNGFDTSMC)来确定双转子MIMO系统(TRMS)的主角和尾角。控制目标是将TRMS稳定在参考位置或遵循预定的轨迹。为了识别TRMS的未知非线性动力学,已经使用了自适应RBFNN。另外,添加了另一种自适应控制表达式,以减少阵风,外部干扰影响并补偿自适应RBFNN的估计误差。此外,使用Lyapunov方法可以确保闭环的稳定性分析。所开发的控制器适用于TRMS,其尾部和主要子系统之间具有交叉耦合,而无需进行解耦程序。










































 京公网安备 11010802027423号
京公网安备 11010802027423号