Journal of Neuroscience Methods ( IF 2.7 ) Pub Date : 2020-09-21 , DOI: 10.1016/j.jneumeth.2020.108955 Phuong T Ly 1 , Alexandra Lucas 2 , Sio Hang Pun 3 , Anna Dondzillo 2 , Chao Liu 1 , Achim Klug 2 , Tim C Lei 4
|
Background
Some experimental approaches in neuroscience research require the precise placement of a recording electrode, pipette or other tool into a specific brain area that can be quite small and/or located deep beneath the surface. This process is typically aided with stereotaxic methods but remains challenging due to a lack of advanced technology to aid the experimenter. Currently, procedures require a significant amount of skill, have a high failure rate, and take up a significant amount of time.
New method
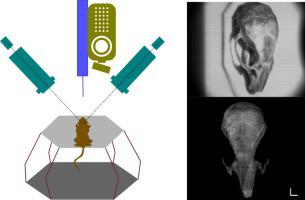
We developed a next generation robotic stereotaxic platform for small rodents by combining a three-dimensional (3D) skull profiler sub-system and a full six degree-of-freedom (6DOF) robotic platform. The 3D skull profiler is based on structured illumination in which a series of horizontal and vertical line patterns are projected onto an animal skull. These patterns are captured by two two-dimensional (2D) CCD cameras which reconstruct an accurate 3D skull surface profile based on structured illumination and geometrical triangulation. Using the reconstructed 3D profile, the skull can be repositioned using a 6DOF robotic platform to accurately align a surgical tool.
Results
The system was evaluated using mechanical measurement techniques, and the accuracy of the platform was demonstrated using agar brain phantoms and animal skulls. Additionally, a small and deep brain nucleus (the medial nucleus of the trapezoid body) were targeted in rodents to confirm the targeting accuracy.
Conclusions
The new stereotaxic system can accomplish “skull-flat” rapidly and precisely and with minimal user intervention, and thus reduces the failure rate of such experiments.
中文翻译:
基于3D颅骨重建的机器人立体定位系统提高手术准确性和速度
背景
神经科学研究中的一些实验方法需要将记录电极、移液管或其他工具精确放置到特定的大脑区域中,该区域可能非常小和/或位于表面深处。该过程通常借助立体定向方法进行辅助,但由于缺乏先进的技术来帮助实验者,因此仍然具有挑战性。目前,程序需要大量的技能,具有很高的失败率,并且需要大量的时间。
新方法
我们通过结合三维 (3D) 颅骨轮廓仪子系统和完整的六自由度 (6DOF) 机器人平台,为小型啮齿动物开发了下一代机器人立体定位平台。3D 头骨轮廓仪基于结构化照明,其中将一系列水平和垂直线条图案投影到动物头骨上。这些图案由两个二维 (2D) CCD 相机捕获,这些相机基于结构化照明和几何三角测量重建准确的 3D 颅骨表面轮廓。使用重建的 3D 轮廓,可以使用 6DOF 机器人平台重新定位头骨,以准确对齐手术工具。
结果
该系统使用机械测量技术进行评估,并使用琼脂脑模型和动物头骨证明了平台的准确性。此外,在啮齿动物中靶向一个小而深的脑核(梯形体的内侧核)以确认靶向准确性。
结论
新的立体定向系统可以在最少的用户干预下快速准确地完成“颅骨扁平化”,从而降低此类实验的失败率。










































 京公网安备 11010802027423号
京公网安备 11010802027423号