当前位置:
X-MOL 学术
›
Mater. Horiz.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
High-twist-pervaded electrochemical yarn muscles with ultralarge and fast contractile actuations
Materials Horizons ( IF 12.2 ) Pub Date : 2020-09-18 , DOI: 10.1039/d0mh01352h Yulian Wang 1, 2, 3, 4, 5 , Jian Qiao 5, 6, 7, 8, 9 , Kunjie Wu 5, 6, 7, 8, 9 , Wei Yang 5, 6, 7, 8, 9 , Ming Ren 1, 2, 3, 4, 5 , Lizhong Dong 1, 2, 3, 4, 5 , Yurong Zhou 1, 2, 3, 4, 5 , Yulong Wu 5, 6, 7, 8, 9 , Xiaona Wang 5, 6, 7, 8, 9 , Zhenzhong Yong 5, 6, 7, 8, 9 , Jiangtao Di 1, 2, 3, 4, 5 , Qingwen Li 1, 2, 3, 4, 5
Materials Horizons ( IF 12.2 ) Pub Date : 2020-09-18 , DOI: 10.1039/d0mh01352h Yulian Wang 1, 2, 3, 4, 5 , Jian Qiao 5, 6, 7, 8, 9 , Kunjie Wu 5, 6, 7, 8, 9 , Wei Yang 5, 6, 7, 8, 9 , Ming Ren 1, 2, 3, 4, 5 , Lizhong Dong 1, 2, 3, 4, 5 , Yurong Zhou 1, 2, 3, 4, 5 , Yulong Wu 5, 6, 7, 8, 9 , Xiaona Wang 5, 6, 7, 8, 9 , Zhenzhong Yong 5, 6, 7, 8, 9 , Jiangtao Di 1, 2, 3, 4, 5 , Qingwen Li 1, 2, 3, 4, 5
Affiliation
|
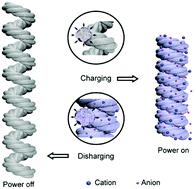
Artificial yarn muscles, behaving like real muscles but providing higher energy output, have attracted considerable interest recently. However, yarn muscles driven by low-voltage electrochemical ion injection still suffer from low contraction and slow responses. Herein, an electrochemical yarn muscle with ultralarge and fast contractile actuations was prepared by twisting and coiling a group of s-spun carbon nanotube (CNT) yarns that have a layered inner structure. When electrochemically driven at 3.0 V, the yarn muscle generated 62.4% contraction in 5 s while lifting a heavy weight 10 000 times the mass of the muscle, outperforming normal yarns containing the same amount of CNTs and the literature results for electrochemical yarn muscles. A linear dependence of the contraction on the voltage was observed, which is of great importance for muscle control. Moreover, the yarn muscle showed high cycling stability with >95% contraction retention after 4500 running cycles. The high actuation performance was attributed to the existence of the highly twisted structure pervading the whole yarns for large effective actuation volume and the presence of gaps at hierarchical levels that facilitate ion injection. Considering the low driving voltages, programmable contractions, and high energy output, the present yarn muscles can help the development of soft robots and artificial limbs.
中文翻译:

高捻度的电化学纱线肌肉,具有超大且快速的收缩致动
近来,人造纱线的肌肉表现得像真实的肌肉,但提供更高的能量输出,引起了人们的极大兴趣。然而,由低压电化学离子注入驱动的纱线肌肉仍然遭受低收缩和缓慢响应的困扰。在此,通过加捻和卷绕一组具有层状内部结构的s-spun碳纳米管(CNT)纱线来制备具有超大且快速收缩致动的电化学纱线肌。当以3.0 V进行电化学驱动时,纱线肌肉在5 s内产生62.4%的收缩,而举起的重量是肌肉的10000倍,胜于包含相同数量CNT的普通纱线,而电化学纱线的文献报道也是如此。观察到收缩对电压的线性依赖性,这对于控制肌肉非常重要。此外,在4500个运行循环后,纱线肌肉显示出较高的循环稳定性,收缩保留率> 95%。较高的驱动性能归因于存在高度扭曲的结构,该结构遍布整个纱线,可实现较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。较高的驱动性能归因于存在高捻度结构,这种结构遍布整个纱线以获得较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。较高的驱动性能归因于存在高捻度结构,这种结构遍布整个纱线以获得较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。
更新日期:2020-10-06
中文翻译:
高捻度的电化学纱线肌肉,具有超大且快速的收缩致动
近来,人造纱线的肌肉表现得像真实的肌肉,但提供更高的能量输出,引起了人们的极大兴趣。然而,由低压电化学离子注入驱动的纱线肌肉仍然遭受低收缩和缓慢响应的困扰。在此,通过加捻和卷绕一组具有层状内部结构的s-spun碳纳米管(CNT)纱线来制备具有超大且快速收缩致动的电化学纱线肌。当以3.0 V进行电化学驱动时,纱线肌肉在5 s内产生62.4%的收缩,而举起的重量是肌肉的10000倍,胜于包含相同数量CNT的普通纱线,而电化学纱线的文献报道也是如此。观察到收缩对电压的线性依赖性,这对于控制肌肉非常重要。此外,在4500个运行循环后,纱线肌肉显示出较高的循环稳定性,收缩保留率> 95%。较高的驱动性能归因于存在高度扭曲的结构,该结构遍布整个纱线,可实现较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。较高的驱动性能归因于存在高捻度结构,这种结构遍布整个纱线以获得较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。较高的驱动性能归因于存在高捻度结构,这种结构遍布整个纱线以获得较大的有效驱动量,并且存在促进离子注入的分层级间隙。考虑到低驱动电压,可编程收缩和高能量输出,目前的纱线肌肉可以帮助开发软机器人和假肢。










































 京公网安备 11010802027423号
京公网安备 11010802027423号