Applied Soft Computing ( IF 7.2 ) Pub Date : 2020-09-15 , DOI: 10.1016/j.asoc.2020.106694 Songsang Koh , Bo Zhou , Hui Fang , Po Yang , Zaili Yang , Qiang Yang , Lin Guan , Zhigang Ji
|
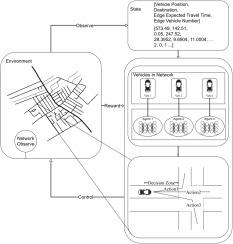
Traffic congestion has become one of the most serious contemporary city issues as it leads to unnecessary high energy consumption, air pollution and extra traveling time. During the past decade, many optimization algorithms have been designed to achieve the optimal usage of existing roadway capacity in cities to leverage the problem. However, it is still a challenging task for the vehicles to interact with the complex city environment in a real time manner. In this paper, we propose a deep reinforcement learning (DRL) method to build a real-time intelligent vehicle routing and navigation system by formulating the task as a sequence of decisions. In addition, an integrated framework is provided to facilitate the intelligent vehicle navigation research by embedding smart agents into the SUMO simulator. Nine realistic traffic scenarios are simulated to test the proposed navigation method. The experimental results have demonstrated the efficient convergence of the vehicle navigation agents and their effectiveness to make optimal decisions under the volatile traffic conditions. The results also show that the proposed method provides a better navigation solution comparing to the benchmark routing optimization algorithms. The performance has been further validated by using the Wilcoxon test. It is found that the achieved improvement of our proposed method becomes more significant under the maps with more edges (roads) and more complicated traffics comparing to the state-of-the-art navigation methods.
中文翻译:
基于实时深度强化学习的车辆导航
交通拥堵已成为当代最严重的城市问题之一,它导致不必要的高能耗,空气污染和额外的出行时间。在过去的十年中,已经设计了许多优化算法来实现城市中现有道路通行能力的最佳利用,以解决该问题。然而,车辆以实时方式与复杂的城市环境交互仍然是一项艰巨的任务。在本文中,我们提出了一种深度强化学习(DRL)方法,通过将任务公式化为决策序列来构建实时智能车辆路线和导航系统。此外,还提供了一个集成框架,通过将智能代理嵌入SUMO模拟器来促进智能车辆导航研究。模拟了九种现实交通场景,以测试所提出的导航方法。实验结果证明了车辆导航代理的有效收敛及其在交通动荡的情况下做出最佳决策的有效性。结果还表明,与基准路由优化算法相比,该方法提供了更好的导航解决方案。通过使用Wilcoxon测试,该性能得到了进一步验证。发现,与最新的导航方法相比,在具有更多边缘(道路)和更复杂交通的地图下,我们提出的方法所实现的改进变得更加重要。实验结果证明了车辆导航代理的有效收敛及其在交通动荡的情况下做出最佳决策的有效性。结果还表明,与基准路由优化算法相比,该方法提供了更好的导航解决方案。通过使用Wilcoxon测试,该性能得到了进一步验证。发现,与现有技术的导航方法相比,在具有更多边缘(道路)和更复杂交通的地图下,我们提出的方法所实现的改进变得更加重要。实验结果证明了车辆导航代理的有效收敛及其在交通动荡的情况下做出最佳决策的有效性。结果还表明,与基准路由优化算法相比,该方法提供了更好的导航解决方案。通过使用Wilcoxon测试,该性能得到了进一步验证。发现,与现有技术的导航方法相比,在具有更多边缘(道路)和更复杂交通的地图下,我们提出的方法所实现的改进变得更加重要。通过使用Wilcoxon测试,该性能得到了进一步验证。发现,与现有技术的导航方法相比,在具有更多边缘(道路)和更复杂交通的地图下,我们提出的方法的改进变得更加重要。通过使用Wilcoxon测试,该性能得到了进一步验证。发现,与最新的导航方法相比,在具有更多边缘(道路)和更复杂交通的地图下,我们提出的方法所实现的改进变得更加重要。










































 京公网安备 11010802027423号
京公网安备 11010802027423号