当前位置:
X-MOL 学术
›
Comput. Electr. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Neural-fuzzy controller configuration design for an electro-optical line of sight stabilization system
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.compeleceng.2020.106837 Ravindra Singh , Shahida Khatoon , Himanshu Chaudhary , Ashish Pandey , M. Hanmandlu
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.compeleceng.2020.106837 Ravindra Singh , Shahida Khatoon , Himanshu Chaudhary , Ashish Pandey , M. Hanmandlu
|
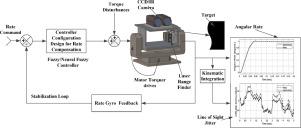
Abstract This paper presents a Neural-fuzzy model structure to improve the disturbance attenuation performance of a gimballed Line of Sight (LOS) stabilization system. Initially, a Fuzzy Logic Controller (FLC) based on prior qualitative information about system dynamics and linguistic performance criteria is developed. Next, proposed Neural-fuzzy model architecture is constructed, which overcome the difficulties and limitations of each isolated methodology. The Neural-fuzzy architecture is developed based on input-output data-sets available from FLC. Fuzzy curve approach is used to determine significant inputs, number of rules, initialization of connecting layers weights, and hence the model structure. Both the controller configurations are tested based on critical performance characteristics such as stability of the loop, responsiveness of the loop and insensitivity to disturbances. Finally, the comparative analysis suggests that the proposed Neural-fuzzy controller completely outperforms the FLC configuration and hence, can be very effective for more precise pointing applications.
中文翻译:

一种电光视线稳定系统的神经模糊控制器配置设计
摘要 本文提出了一种神经模糊模型结构,以提高万向节视线(LOS)稳定系统的干扰衰减性能。最初,基于有关系统动力学和语言性能标准的先验定性信息开发了模糊逻辑控制器 (FLC)。接下来,构建了提出的神经模糊模型架构,克服了每种孤立方法的困难和局限性。神经模糊架构是基于 FLC 提供的输入输出数据集开发的。模糊曲线方法用于确定重要输入、规则数量、连接层权重的初始化,从而确定模型结构。两种控制器配置均基于关键性能特征(例如回路稳定性)进行测试,环路的响应性和对干扰的不敏感性。最后,比较分析表明,所提出的神经模糊控制器完全优于 FLC 配置,因此对于更精确的指向应用非常有效。
更新日期:2020-12-01
中文翻译:
一种电光视线稳定系统的神经模糊控制器配置设计
摘要 本文提出了一种神经模糊模型结构,以提高万向节视线(LOS)稳定系统的干扰衰减性能。最初,基于有关系统动力学和语言性能标准的先验定性信息开发了模糊逻辑控制器 (FLC)。接下来,构建了提出的神经模糊模型架构,克服了每种孤立方法的困难和局限性。神经模糊架构是基于 FLC 提供的输入输出数据集开发的。模糊曲线方法用于确定重要输入、规则数量、连接层权重的初始化,从而确定模型结构。两种控制器配置均基于关键性能特征(例如回路稳定性)进行测试,环路的响应性和对干扰的不敏感性。最后,比较分析表明,所提出的神经模糊控制器完全优于 FLC 配置,因此对于更精确的指向应用非常有效。










































 京公网安备 11010802027423号
京公网安备 11010802027423号