Measurement ( IF 5.2 ) Pub Date : 2020-09-10 , DOI: 10.1016/j.measurement.2020.108437 Yangyang Zhang , Ying Huang , Yunjian Ge , Nana Bao
|
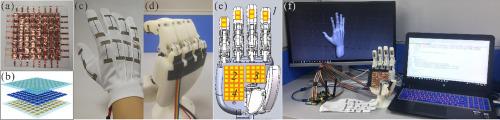
The cooperative perception technology of master–slave hand operation provides intelligent and convenient support for people engaged in various risky and arduous tasks. This study presents a master–slave hand operation cooperative perception method for grasping objects through multi-information fusion of flexible strain sensors. A data glove and a strain sensor array are designed on stretchable strain sensors for accurate detection of master–slave hand ontology gestures. Meanwhile, a flexible tactile sensor array is proposed for dexterous hand interactive tactile perception. Furthermore, the master–slave hand gesture coordination method is presented. A method of perceiving dexterous hand grasping operation states is proposed on the basis of tactile perception arrays and clustering analysis of tactile perception sequences. Experimental results show that the proposed data glove and tactile sensor arrays exhibit good performance of master–slave hand ontology gesture perception and coordination as well as dexterous hand interactive tactile perception. The error measurements of the joint angle of master-slave hand during gesture coordination process were less than two degrees.
中文翻译:
通过柔性应变传感器的信息融合来掌握物体的主从手操作协同感知系统
主从手操作的协作感知技术为从事各种高风险和艰巨任务的人们提供了智能便捷的支持。本研究提出了一种通过柔性应变传感器的多信息融合来掌握物体的主从手协同操作感知方法。在可拉伸应变传感器上设计了数据手套和应变传感器阵列,用于精确检测主从手的本体手势。同时,提出了一种灵活的触觉传感器阵列,用于灵巧的手交互式触觉感知。此外,提出了主从手势协调方法。在触觉感知阵列和触觉感知序列聚类分析的基础上,提出了一种感知手部抓握操作状态的方法。实验结果表明,提出的数据手套和触觉传感器阵列表现出良好的主从手本体手势感知和协调性能以及灵巧的手互动触觉感知。手势协调过程中主从手关节角度的误差测量值小于2度。










































 京公网安备 11010802027423号
京公网安备 11010802027423号