Applied Materials Today ( IF 7.2 ) Pub Date : 2020-09-04 , DOI: 10.1016/j.apmt.2020.100814 Lei Liu , Junshi Zhang , Meng Luo , Hualing Chen , Zhichun Yang , Dichen Li , Pengfei Li
|
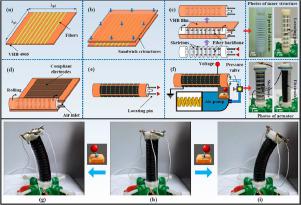
In this article, inspired by biological structures, we develop a soft-rigid hybrid actuator (SRHA), based on fiber-reinforced dielectric elastomers (DEs) and a skeleton backbone system. The skeleton backbone is designed by mimicking the septa-muscle structure of earthworms. The fiber-reinforced DEs are conceived from the unidirectional and antagonistic deformation of natural muscles. Effect of distribution of skeletons on the SRHA is firstly studied through both experiments and FEM simulations. Besides, the fabricated SRHA is discovered to be with two actuation modes: (a) the voltage control mode, which is suitable for small deformation and accurate tuning; (b) the pressure control mode, which can be utilized for high output force and coarse tuning. Moreover, upon the critical pneumatic pressure (a prime trigger which highly relies on the distribution of skeletons), the pressure control mode can evolve to an enhancement mode by harnessing the buckling instability. Furthermore, in this enhanced mode, the electric power reduces to an ultra-low threshold for DEAs (even less than 2000 V), and hopefully degrades into a direction guiding disturbance. On the other hand, to ensure the stiffness maintaining capability, based on the fiber jamming mechanism, the variable stiffness unit (VSU) is designed for the SRHAs by absorbing the inspiration from the protective constraint mechanism of ligament-bone system. Remarkable stiffness maintaining capability of SRHA is experimentally proved to carry more than 20 times loads than its own weight. This proposed SRHA holds a great promise for application in continuum soft robotics explorations.
中文翻译:
由电活性介电弹性体制成的生物启发式软刚性混合执行器
在本文中,受生物结构的启发,我们基于纤维增强介电弹性体(DE)和骨架骨架系统开发了一种软刚性混合执行器(SRHA)。骨架骨架是通过模仿the的隔肌结构来设计的。纤维增强的DEs是从天然肌肉的单向和拮抗变形构想的。首先通过实验和有限元模拟研究了骨架分布对SRHA的影响。此外,发现所制造的SRHA具有两种致动模式:(a)电压控制模式,其适合于小变形和精确调整;(b)压力控制模式,可用于高输出力和粗调。此外,在临界气压(高度依赖骨骼分布的主要触发因素)上,压力控制模式可以通过利用屈曲不稳定性来发展为增强模式。此外,在这种增强模式下,电功率降低到DEA的超低阈值(甚至小于2000 V),并有希望退化为引导干扰的方向。另一方面,为了确保刚度保持能力,基于纤维阻塞机制,通过吸收韧带-骨系统保护约束机制的启发,为SRHA设计了可变刚度单元(VSU)。通过实验证明,SRHA具有显着的刚度保持能力,是其自重的20倍以上。










































 京公网安备 11010802027423号
京公网安备 11010802027423号