当前位置:
X-MOL 学术
›
Rob. Auton. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Spatiotemporal chaotification of delta robot mixer for homogeneous graphene nanocomposite dispersing
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.robot.2020.103633 Savas Sahin , Ali Emre Kavur , Sibel Demiroglu Mustafov , Ozgur Seydibeyoglu , Ozgun Baser , Yalcin Isler , Cuneyt Guzelis
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.robot.2020.103633 Savas Sahin , Ali Emre Kavur , Sibel Demiroglu Mustafov , Ozgur Seydibeyoglu , Ozgun Baser , Yalcin Isler , Cuneyt Guzelis
|
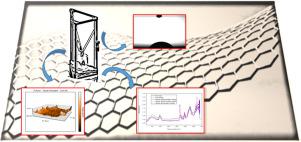
Abstract This paper presents the design, implementation and polymer nanocomposite mixing application of a robust spatiotemporal chaotic delta robot. Blending fluids efficiently is a vital process for the preparation of graphene nanocomposite mixing. The most commonly used mixing materials are polymeric materials that need to be blended in non-Newtonian fluids. To achieve a superior blending performance over the conventional ones, it is used two different chaotification mechanisms for the realization of the spatiotemporal chaotic delta robot mixer system. One of them is for the chaotification of the mixer propeller while the second one is for the chaotification of the three-dimensional position of the endpoint of the delta robot. The model-based robust chaotification scheme based on sliding mode control is applied to chaotify the speed of the delta robot-mixer via dynamical state-feedback chaotification method. The chaotification of 3D position of the mixer is realized in a feedforward way by producing chaotic input signals. The implemented robust chaotic delta robot mixer exploits the efficacy of chaotic mixing in obtaining homogeneity in the mixture with less operation time, and hence reduced electrical energy consumption. In these performance evaluations, energy consumption and material characterization, which are measured by reliable material characterization methods such as X-ray diffraction, Fourier-transform-infrared spectroscopy, water contact angle, dynamical mechanical analysis, atomic force microscopy, Raman and field emission-scanning electron microscope analyses, are used as criteria. The obtained results show that, for the delta robot, the proposed chaotic-speed together with 3D chaotic-movement operation mode provides a better mixing performance than other mixing operation modes.
中文翻译:

用于均质石墨烯纳米复合材料分散的 delta 机器人混合器的时空混沌
摘要 本文介绍了一种鲁棒的时空混沌 delta 机器人的设计、实现和聚合物纳米复合材料的混合应用。有效混合流体是制备石墨烯纳米复合材料混合物的重要过程。最常用的混合材料是需要在非牛顿流体中混合的聚合物材料。为了实现优于传统的混合性能,它使用了两种不同的混沌机制来实现时空混沌 delta 机器人混合系统。其中一个是搅拌机螺旋桨的混沌,第二个是delta机器人端点三维位置的混沌。将基于滑模控制的基于模型的鲁棒混沌方案应用于通过动态状态反馈混沌方法对delta机器人-搅拌机的速度进行混沌。通过产生混沌输入信号,以前馈方式实现混合器 3D 位置的混沌。实现的鲁棒混沌 delta 机器人混合器利用混沌混合的功效,以更少的操作时间获得混合物的均匀性,从而降低电能消耗。在这些性能评估中,能耗和材料表征是通过可靠的材料表征方法测量的,例如 X 射线衍射、傅里叶变换红外光谱、水接触角、动态力学分析、原子力显微镜、拉曼和场发射扫描电子显微镜分析被用作标准。获得的结果表明,对于 delta 机器人,所提出的混沌速度和 3D 混沌运动操作模式比其他混合操作模式提供了更好的混合性能。
更新日期:2020-12-01
中文翻译:
用于均质石墨烯纳米复合材料分散的 delta 机器人混合器的时空混沌
摘要 本文介绍了一种鲁棒的时空混沌 delta 机器人的设计、实现和聚合物纳米复合材料的混合应用。有效混合流体是制备石墨烯纳米复合材料混合物的重要过程。最常用的混合材料是需要在非牛顿流体中混合的聚合物材料。为了实现优于传统的混合性能,它使用了两种不同的混沌机制来实现时空混沌 delta 机器人混合系统。其中一个是搅拌机螺旋桨的混沌,第二个是delta机器人端点三维位置的混沌。将基于滑模控制的基于模型的鲁棒混沌方案应用于通过动态状态反馈混沌方法对delta机器人-搅拌机的速度进行混沌。通过产生混沌输入信号,以前馈方式实现混合器 3D 位置的混沌。实现的鲁棒混沌 delta 机器人混合器利用混沌混合的功效,以更少的操作时间获得混合物的均匀性,从而降低电能消耗。在这些性能评估中,能耗和材料表征是通过可靠的材料表征方法测量的,例如 X 射线衍射、傅里叶变换红外光谱、水接触角、动态力学分析、原子力显微镜、拉曼和场发射扫描电子显微镜分析被用作标准。获得的结果表明,对于 delta 机器人,所提出的混沌速度和 3D 混沌运动操作模式比其他混合操作模式提供了更好的混合性能。










































 京公网安备 11010802027423号
京公网安备 11010802027423号