Expert Systems with Applications ( IF 7.5 ) Pub Date : 2020-09-03 , DOI: 10.1016/j.eswa.2020.113900 J. Reynosa-Guerrero , J.-M. Garcia-Huerta , A. Vazquez-Cervantes , E. Reyes-Santos , J.-L. Perez-Ramos , H. Jimenez-Hernandez
|
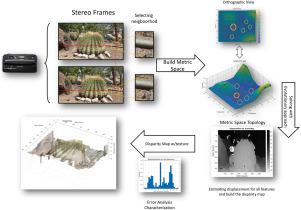
In several approaches that include analysis processes – the most well-known being object tracking, video understanding, automatic surveillance systems, and image reconstruction – there are basic tasks to be performed. One of these tasks is related to how to select an image feature window in a frame and then compute its displacement in another frame. In the literature, the last two tasks represent an open research topic because (1) estimation of the similitude for a region window involves a set of invariants that are scene-dependent; (2) a general method for detecting the best-fitting region criterion to compute the displacement is dependent on the similarity criterion and numerical approaches for estimating the displacement; and (3) the type of conditions must be warranted so that an image feature has a high probability of estimating the displacement and numerically reaching a convergence state. In this paper, we propose a framework to estimate the displacement of an image feature from a reference image to another image. The proposal uses a generalization of the optimization concept, that is, a random search process in the dissimilarity metric space. This approach is carried out in a discrete space by mapping the variable domain to be estimated to a symbolic space with a set of operators, where a random search method is described through a uniform sampling process and genetic operators. The approach searches for the best suboptimal solution of the locality under a predefined metric criterion, avoiding divergence for the worst suboptimal solutions. The proposal is based on the formalization of the Lucas and Kanade approach. It considers as a metric-space solution the proposal of the Shi and Tomasi approach, but instead of a Taylor series expansion and step-descendant approach to solve the system, an evolutionary algorithm is used. The reference approach is well accepted as one of the most important approaches in motion displacement. To test our approach, we take the task of building a disparity map for 3D geometry extraction given the number of times the displacement computation is performed (once for each pixel). Finally, the results demonstrate that the evolutionary approach increases the repeatability and robustness of the distance estimation.
中文翻译:
通过进化算法和全局图像特征作为描述符来估计视差图

在包括分析过程在内的几种方法中(最著名的是对象跟踪,视频理解,自动监视系统和图像重建),需要执行一些基本任务。这些任务之一与如何在一个框架中选择图像特征窗口,然后在另一个框架中计算其位移有关。在文献中,最后两个任务代表了一个开放的研究主题,因为(1)估计区域窗口的相似性涉及一组与场景相关的不变性;(2)用于检测最佳拟合区域准则以计算位移的通用方法取决于相似性准则和估计位移的数值方法;(3)必须保证条件的类型,以使图像特征具有很高的估计位移的可能性并在数值上达到会聚状态。在本文中,我们提出了一个框架来估计图像特征从参考图像到另一幅图像的位移。该建议使用了优化概念的概括,即在相异性度量空间中的随机搜索过程。通过使用一组算子将待估计的可变域映射到符号空间,在离散空间中执行此方法,其中通过统一采样过程和遗传算子来描述随机搜索方法。该方法在预定义的度量标准下搜索局部性的最佳次优解决方案,避免了最差次优解决方案的分歧。该提议基于卢卡斯和卡纳德方法的形式化。它考虑了Shi and Tomasi方法的建议作为度量空间解决方案,但是使用泰勒级数展开和步长后继方法来求解该系统,而不是使用进化算法。参考方法被公认为运动位移中最重要的方法之一。为了测试我们的方法,在给定执行位移计算的次数(每个像素一次)的情况下,我们承担了构建3D几何图形提取视差图的任务。最后,结果表明,进化方法提高了距离估计的可重复性和鲁棒性。但是使用泰勒级数展开算法代替系统求解的泰勒级数展开和步降方法。参考方法被公认为运动位移中最重要的方法之一。为了测试我们的方法,我们承担了在给定位移计算执行次数(每个像素一次)的情况下为3D几何图形提取视差图的任务。最后,结果表明,进化方法提高了距离估计的可重复性和鲁棒性。但是,不是使用泰勒级数展开式和后继方法来求解系统,而是使用了进化算法。参考方法被公认为运动位移中最重要的方法之一。为了测试我们的方法,我们承担了在给定位移计算执行次数(每个像素一次)的情况下为3D几何图形提取视差图的任务。最后,结果表明,进化方法提高了距离估计的可重复性和鲁棒性。我们执行给定位移计算执行次数(每个像素一次)的3D几何图形提取视差图的任务。最后,结果表明,进化方法提高了距离估计的可重复性和鲁棒性。我们执行给定位移计算执行次数(每个像素一次)的3D几何图形提取视差图的任务。最后,结果表明,进化方法提高了距离估计的可重复性和鲁棒性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号