当前位置:
X-MOL 学术
›
Comput. Animat. Virtual Worlds
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Real‐time suturing simulation for virtual reality medical training
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2020-07-01 , DOI: 10.1002/cav.1940 Peng Yu 1, 2 , Junjun Pan 1, 2, 3 , Hong Qin 4 , Aimin Hao 1, 2 , Haipeng Wang 5
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2020-07-01 , DOI: 10.1002/cav.1940 Peng Yu 1, 2 , Junjun Pan 1, 2, 3 , Hong Qin 4 , Aimin Hao 1, 2 , Haipeng Wang 5
Affiliation
|
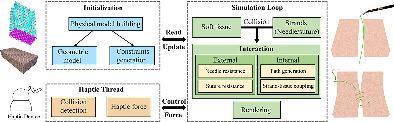
At present, virtual reality (VR) ‐based medical simulators provide an efficient and cost‐effective alternative without exposing risk to the traditional training approaches. As an essential and indispensable task in fundamental surgical skills training, the research of suturing simulation still remains insufficient in the field of virtual surgery. In this paper, we present a real‐time suturing simulation framework which can handle the complex interactions between surgical instruments and soft tissue. The simulation consists of two stages: external interaction and internal coupling. External interaction involves the interplay between needle/suture and the soft tissue, which are both deformed by position‐based dynamics (PBD) with different constraints. At the internal coupling stage, once the force exceeds a threshold, the needle tip will puncture and penetrate into the soft tissue and generate a path. To guarantee the needle/suture accurately following the path inside the soft tissue, we propose a novel coupling method by matching and generating the constraints among needle, suture, and penetration path. We have applied this suturing simulation into a VR laparoscopic surgery simulator with haptic force. Our experimental results demonstrate that our approach can achieve real‐time performance with a high degree of visual realism and haptic fidelity.
中文翻译:

用于虚拟现实医学培训的实时缝合模拟
目前,基于虚拟现实 (VR) 的医疗模拟器提供了一种高效且具有成本效益的替代方案,而不会给传统培训方法带来风险。缝合模拟作为基础手术技能训练中必不可少且不可缺少的任务,在虚拟手术领域中的研究仍然不足。在本文中,我们提出了一个实时缝合模拟框架,可以处理手术器械和软组织之间复杂的相互作用。模拟包括两个阶段:外部交互和内部耦合。外部相互作用涉及针/缝合线和软组织之间的相互作用,它们都通过具有不同约束的基于位置的动力学 (PBD) 变形。在内部耦合阶段,一旦力超过阈值,针尖将刺入并穿透软组织并产生路径。为了保证针/缝线准确地遵循软组织内部的路径,我们通过匹配和生成针、缝线和穿透路径之间的约束,提出了一种新的耦合方法。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。
更新日期:2020-07-01
中文翻译:
用于虚拟现实医学培训的实时缝合模拟
目前,基于虚拟现实 (VR) 的医疗模拟器提供了一种高效且具有成本效益的替代方案,而不会给传统培训方法带来风险。缝合模拟作为基础手术技能训练中必不可少且不可缺少的任务,在虚拟手术领域中的研究仍然不足。在本文中,我们提出了一个实时缝合模拟框架,可以处理手术器械和软组织之间复杂的相互作用。模拟包括两个阶段:外部交互和内部耦合。外部相互作用涉及针/缝合线和软组织之间的相互作用,它们都通过具有不同约束的基于位置的动力学 (PBD) 变形。在内部耦合阶段,一旦力超过阈值,针尖将刺入并穿透软组织并产生路径。为了保证针/缝线准确地遵循软组织内部的路径,我们通过匹配和生成针、缝线和穿透路径之间的约束,提出了一种新的耦合方法。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。我们已将此缝合模拟应用到具有触觉力的 VR 腹腔镜手术模拟器中。我们的实验结果表明,我们的方法可以实现具有高度视觉真实感和触觉保真度的实时性能。






































 京公网安备 11010802027423号
京公网安备 11010802027423号