当前位置:
X-MOL 学术
›
Rob. Auton. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A review of terrain detection systems for applications in locomotion assistance
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.robot.2020.103628 Ali H.A. Al-dabbagh , Renaud Ronsse
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.robot.2020.103628 Ali H.A. Al-dabbagh , Renaud Ronsse
|
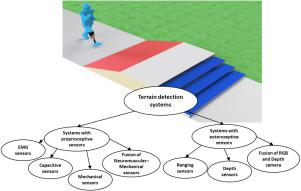
Abstract Terrain detection systems have been developed for a large body of applications. For instance, a bionic leg prosthesis would have to adapt its behavior as a function of the terrain, in order to restore a sound lower-limb biomechanics to the amputee. Visually impaired people benefit from such systems in order to collect information about their locomotion environment and avoid obstacles. Finally, mobile robots use them for estimating terrain traversability, and adjusting control algorithms as a function of the surface type. This diversity of applications led to a large repertoire of systems, regarding both hardware (sensors, processing unit) and software used for classification. This paper provides an extended review of these systems, with a specific focus on the assistance of disabled walker. More precisely, it overviews the sensory systems and algorithms that were implemented to identify different locomotion terrains in indoor or urban environments (flat ground, stairs, slopes) in a way that they are or can be worn by a human user, and running in real-time. Contributions from mobile robotics are also included, pending that they could be adapted to a scenario of locomotion assistance. The systems are classified into two categories: these relying on proprioceptive sensors only and those further using exteroceptive sensors. Contributions from both categories are then compared according to their main specifications, such as accuracy and prediction time. The paper unambiguously shows that systems with exteroceptive sensors have higher prediction capability than systems with proprioceptive sensors only, and should thus be favored for assistive devices requiring predicting transitions between locomotion tasks.
中文翻译:

用于运动辅助的地形检测系统综述
摘要 地形检测系统已被开发用于大量应用。例如,仿生腿假肢必须根据地形调整其行为,以便为截肢者恢复良好的下肢生物力学。视障人士受益于此类系统,以便收集有关其运动环境的信息并避开障碍物。最后,移动机器人使用它们来估计地形可穿越性,并根据表面类型调整控制算法。这种应用的多样性导致了大量系统,包括用于分类的硬件(传感器、处理单元)和软件。本文对这些系统进行了扩展回顾,特别关注残疾步行者的援助。更确切地说,它概述了用于识别室内或城市环境(平坦地面、楼梯、斜坡)中不同运动地形的感官系统和算法,这些地形是人类用户佩戴的或可以佩戴的,并实时运行。移动机器人的贡献也包括在内,等待它们可以适应移动辅助的场景。这些系统分为两类:仅依赖本体感受器的系统和进一步使用外部感受器的系统。然后根据它们的主要规格(例如准确性和预测时间)比较这两个类别的贡献。该论文明确表明,具有外部感受器的系统比仅具有本体感受器的系统具有更高的预测能力,
更新日期:2020-11-01
中文翻译:
用于运动辅助的地形检测系统综述
摘要 地形检测系统已被开发用于大量应用。例如,仿生腿假肢必须根据地形调整其行为,以便为截肢者恢复良好的下肢生物力学。视障人士受益于此类系统,以便收集有关其运动环境的信息并避开障碍物。最后,移动机器人使用它们来估计地形可穿越性,并根据表面类型调整控制算法。这种应用的多样性导致了大量系统,包括用于分类的硬件(传感器、处理单元)和软件。本文对这些系统进行了扩展回顾,特别关注残疾步行者的援助。更确切地说,它概述了用于识别室内或城市环境(平坦地面、楼梯、斜坡)中不同运动地形的感官系统和算法,这些地形是人类用户佩戴的或可以佩戴的,并实时运行。移动机器人的贡献也包括在内,等待它们可以适应移动辅助的场景。这些系统分为两类:仅依赖本体感受器的系统和进一步使用外部感受器的系统。然后根据它们的主要规格(例如准确性和预测时间)比较这两个类别的贡献。该论文明确表明,具有外部感受器的系统比仅具有本体感受器的系统具有更高的预测能力,








































 京公网安备 11010802027423号
京公网安备 11010802027423号