当前位置:
X-MOL 学术
›
Comput. Electron. Agric.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A robot system equipped with deep convolutional neural network for autonomous grading and sorting of root-trimmed garlics
Computers and Electronics in Agriculture ( IF 7.7 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.compag.2020.105727 Dang Quoc Thuyet , Yuichi Kobayashi , Morinobu Matsuo
Computers and Electronics in Agriculture ( IF 7.7 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.compag.2020.105727 Dang Quoc Thuyet , Yuichi Kobayashi , Morinobu Matsuo
|
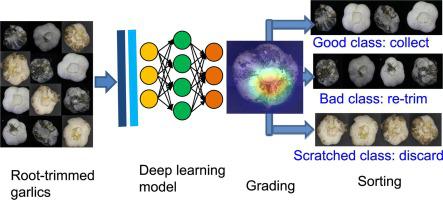
Abstract The demand for smart automation systems in postharvest technology, particularly in the postharvest process of garlic production, is high. In this study, we introduce an artificial intelligence (AI)-integrated robot system for grading and sorting of garlics after root trimming. We developed a robot system that automatically grades and sorts root-trimmed garlics based on image analysis using a deep learning model, which is equipped with a deep convolutional neural network (CNN). The robot system consists of three main modules: image acquisition module (IAM), image processing module (IPM), and garlic sorting module (GSM). The IAM captures a live video of garlic roots using an independent light-emitting diode (LED) and a web camera connected to a computer. The IPM consists of garlic image processing software (GIPS) installed on a Windows 10 computer. GIPS imports videos, detects the shape of garlic bulbs, and predicts the garlic class using the deep learning model. When a garlic bulb shape is detected, the image is preprocessed, and the deep learning model is automatically activated to predict the garlic class. The GSM physically separates garlics into three containers for good, bad, and scratched classes based on a previous predicted result. A total of 800 root-trimmed garlics were tested and evaluated in nine experiments. The processing time to predict classes from a garlic image on a regular laptop computer (Intel® core™ i7-8650U 1.9 GHz CPU, with 16 Gb RAM) was 0.19–0.58 s. The median time to trim and sort one garlic was 11 s (in a setting with three prediction replications), and the overall grading accuracy for the three classes was 89%. The individual predicted precision for the good, bad, and scratched classes was 95%, 68%, and 100%, respectively. Given that the robot system was robust and inexpensive, it has the potential to be integrated into a garlic root trimming machine to develop a fully automatic garlic root trimming and sorting robot.
中文翻译:

一种配备深度卷积神经网络的机器人系统,用于对切根大蒜进行自主分级和分选
摘要 采后技术,特别是大蒜生产的采后过程对智能自动化系统的需求很高。在这项研究中,我们引入了一种人工智能 (AI) 集成机器人系统,用于在切根后对大蒜进行分级和分类。我们开发了一个机器人系统,该系统使用配备深度卷积神经网络 (CNN) 的深度学习模型基于图像分析自动对切根大蒜进行分级和分类。该机器人系统由三个主要模块组成:图像采集模块(IAM)、图像处理模块(IPM)和大蒜分选模块(GSM)。IAM 使用独立的发光二极管 (LED) 和连接到计算机的网络摄像头捕获大蒜根部的实时视频。IPM 由安装在 Windows 10 计算机上的大蒜图像处理软件 (GIPS) 组成。GIPS 导入视频,检测大蒜球茎的形状,并使用深度学习模型预测大蒜类别。当检测到大蒜球茎形状时,对图像进行预处理,并自动激活深度学习模型以预测大蒜类别。GSM 根据先前的预测结果将大蒜物理地分为三个容器,分为好、坏和划痕。在九个实验中测试和评估了总共 800 根切根大蒜。在普通笔记本电脑(英特尔® 酷睿™ i7-8650U 1.9 GHz CPU,16 Gb RAM)上根据大蒜图像预测类别的处理时间为 0.19–0.58 秒。修剪和分类一颗大蒜的中位时间为 11 秒(在具有三个预测重复的设置中),三个班级的总体评分准确率为89%。好、坏和划痕类的个体预测精度分别为 95%、68% 和 100%。鉴于机器人系统坚固且价格低廉,它有可能被集成到大蒜切根机中,以开发出全自动大蒜切根和分拣机器人。
更新日期:2020-11-01
中文翻译:
一种配备深度卷积神经网络的机器人系统,用于对切根大蒜进行自主分级和分选
摘要 采后技术,特别是大蒜生产的采后过程对智能自动化系统的需求很高。在这项研究中,我们引入了一种人工智能 (AI) 集成机器人系统,用于在切根后对大蒜进行分级和分类。我们开发了一个机器人系统,该系统使用配备深度卷积神经网络 (CNN) 的深度学习模型基于图像分析自动对切根大蒜进行分级和分类。该机器人系统由三个主要模块组成:图像采集模块(IAM)、图像处理模块(IPM)和大蒜分选模块(GSM)。IAM 使用独立的发光二极管 (LED) 和连接到计算机的网络摄像头捕获大蒜根部的实时视频。IPM 由安装在 Windows 10 计算机上的大蒜图像处理软件 (GIPS) 组成。GIPS 导入视频,检测大蒜球茎的形状,并使用深度学习模型预测大蒜类别。当检测到大蒜球茎形状时,对图像进行预处理,并自动激活深度学习模型以预测大蒜类别。GSM 根据先前的预测结果将大蒜物理地分为三个容器,分为好、坏和划痕。在九个实验中测试和评估了总共 800 根切根大蒜。在普通笔记本电脑(英特尔® 酷睿™ i7-8650U 1.9 GHz CPU,16 Gb RAM)上根据大蒜图像预测类别的处理时间为 0.19–0.58 秒。修剪和分类一颗大蒜的中位时间为 11 秒(在具有三个预测重复的设置中),三个班级的总体评分准确率为89%。好、坏和划痕类的个体预测精度分别为 95%、68% 和 100%。鉴于机器人系统坚固且价格低廉,它有可能被集成到大蒜切根机中,以开发出全自动大蒜切根和分拣机器人。










































 京公网安备 11010802027423号
京公网安备 11010802027423号