当前位置:
X-MOL 学术
›
Adv. Opt. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Distributed Force Control for Microrobot Manipulation via Planar Multi‐Spot Optical Tweezer
Advanced Optical Materials ( IF 8.0 ) Pub Date : 2020-08-20 , DOI: 10.1002/adom.202000543 Dandan Zhang 1 , Antoine Barbot 1 , Benny Lo 1 , Guang‐Zhong Yang 2
Advanced Optical Materials ( IF 8.0 ) Pub Date : 2020-08-20 , DOI: 10.1002/adom.202000543 Dandan Zhang 1 , Antoine Barbot 1 , Benny Lo 1 , Guang‐Zhong Yang 2
Affiliation
|
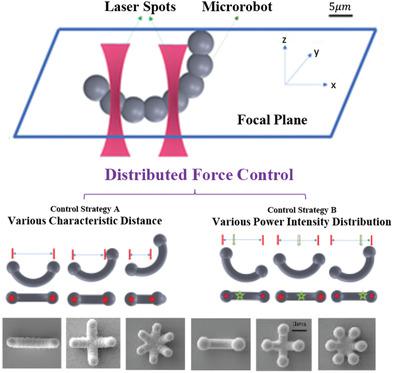
Optical tweezers (OT) represent a versatile tool for micro‐manipulation. To avoid damages to living cells caused by illuminating laser directly on them, microrobots controlled by OT can be used for manipulation of cells or living organisms in microscopic scale. Translation and planar rotation motion of microrobots can be realized by using a multi‐spot planar OT. However, out‐of‐plane manipulation of microrobots is difficult to achieve with a planar OT. This paper presents a distributed manipulation scheme based on multiple laser spots, which can control the out‐of‐plane pose of a microrobot along multiple axes. Different microrobot designs have been investigated and fabricated for experimental validation. The main contributions of this paper include: i) development of a generic model for the structure design of microrobots which enables multi‐dimensional (6D) control via conventional multi‐spot OT; ii) introduction of the distributed force control for microrobot manipulation based on characteristic distance and power intensity distribution. Experiments are performed to demonstrate the effectiveness of the proposed method and its potential applications, which include indirect manipulation of micro‐objects.
中文翻译:

通过平面多点光学镊子控制微型机器人的分布式力控制
镊子(OT)代表了一种用于微操作的多功能工具。为了避免直接在其上照射激光对活细胞造成的损害,可以使用由OT控制的微型机器人在微观尺度上操纵细胞或活生物体。微型机器人的平移和平面旋转运动可以通过使用多点平面OT来实现。但是,使用平面OT很难实现微型机器人的平面外操纵。本文提出了一种基于多个激光点的分布式操纵方案,该方案可以控制微型机器人沿多个轴的平面外姿态。不同的微型机器人设计已经被研究和制造以用于实验验证。本文的主要贡献包括:i)开发用于微型机器人的结构设计的通用模型,该模型可通过常规的多点OT实现多维(6D)控制;ii)引入了基于特征距离和功率强度分布的用于微型机器人操纵的分布式力控制。实验表明,该方法及其潜在应用的有效性,其中包括间接操纵微观物体。
更新日期:2020-08-20
中文翻译:
通过平面多点光学镊子控制微型机器人的分布式力控制
镊子(OT)代表了一种用于微操作的多功能工具。为了避免直接在其上照射激光对活细胞造成的损害,可以使用由OT控制的微型机器人在微观尺度上操纵细胞或活生物体。微型机器人的平移和平面旋转运动可以通过使用多点平面OT来实现。但是,使用平面OT很难实现微型机器人的平面外操纵。本文提出了一种基于多个激光点的分布式操纵方案,该方案可以控制微型机器人沿多个轴的平面外姿态。不同的微型机器人设计已经被研究和制造以用于实验验证。本文的主要贡献包括:i)开发用于微型机器人的结构设计的通用模型,该模型可通过常规的多点OT实现多维(6D)控制;ii)引入了基于特征距离和功率强度分布的用于微型机器人操纵的分布式力控制。实验表明,该方法及其潜在应用的有效性,其中包括间接操纵微观物体。










































 京公网安备 11010802027423号
京公网安备 11010802027423号