Chemical Engineering Research and Design ( IF 3.7 ) Pub Date : 2020-08-13 , DOI: 10.1016/j.cherd.2020.07.028 Dong Hwi Jeong
|
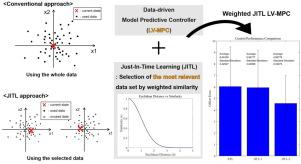
Being different from the continuous process, batch processes in the practical industry have several distinct characteristics, such as the unsteady state, severe nonlinearity, and iterative operation. For tracking a reference trajectory of a batch process, data-driven model predictive controllers have been proposed with the progress of sensors and machine learning. Among them, the latent variable space model-based controllers (LV-MPC) have been applied to the batch processes for decades. When there exist time- and batch-varying trajectory and disturbance, however, utilization of a single model using the aggregate historical dataset may reduce the capability of the predictive model and the control performance. It is because maintaining a single global model can miss the details of process dynamics at the current state. To solve this problem, we propose to update the local model in the manner of just-in-time learning (JITL) and to use them to the predictive controller design at first. Then, two different weighted similarity methods based on principal component analysis (PCA) and partial least squares (PLS) are proposed to enhance the performance of sorting out the most relevant dataset able to explain the current state. A fed-batch bioreactor system, which has time- and batch-varying reference trajectory and disturbance, is simulated to verify the efficiency of the proposed methods. Simulation results show that weighted similarity based on PLS and its application to JITL latent variable space model predictive controller (LV-MPC) has an improved control performance as it sorts out the data with the useful information about the current dynamics.
中文翻译:
基于加权相似度的实时模型预测控制
与连续过程不同,实际工业中的批处理过程具有一些明显的特征,例如不稳定状态,严重的非线性和迭代操作。为了跟踪批处理的参考轨迹,随着传感器和机器学习的发展,提出了数据驱动的模型预测控制器。其中,基于潜变量空间模型的控制器(LV-MPC)已应用于批处理过程已有数十年了。但是,当存在随时间和批次变化的轨迹和扰动时,使用使用汇总历史数据集的单个模型可能会降低预测模型的能力和控制性能。这是因为维护单个全局模型可能会遗漏当前状态下的流程动态细节。为了解决这个问题,我们建议以即时学习(JITL)的方式更新局部模型,并将其首先用于预测性控制器设计。然后,提出了两种基于主成分分析(PCA)和偏最小二乘(PLS)的不同加权相似度方法,以提高整理能够说明当前状态的最相关数据集的性能。仿真了具有时变和间歇变化参考轨迹和扰动的分批补料生物反应器系统,以验证所提方法的有效性。仿真结果表明,基于PLS的加权相似度及其在JITL潜变量空间模型预测控制器(LV-MPC)中的应用具有改进的控制性能,因为它可以利用有关当前动态的有用信息对数据进行分类。










































 京公网安备 11010802027423号
京公网安备 11010802027423号