当前位置:
X-MOL 学术
›
Control Eng. Pract.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Adaptive neural-bias-sliding mode control of rugged electrohydraulic system motion by recurrent Hermite neural network
Control Engineering Practice ( IF 5.4 ) Pub Date : 2020-10-01 , DOI: 10.1016/j.conengprac.2020.104588 Shouvik Chaudhuri , Rana Saha , Amitava Chatterjee , Saikat Mookherjee , Dipankar Sanyal
Control Engineering Practice ( IF 5.4 ) Pub Date : 2020-10-01 , DOI: 10.1016/j.conengprac.2020.104588 Shouvik Chaudhuri , Rana Saha , Amitava Chatterjee , Saikat Mookherjee , Dipankar Sanyal
|
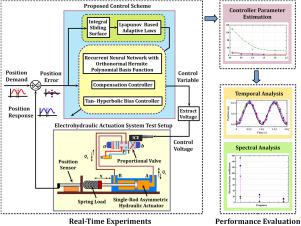
Abstract This paper deals with design and implementation of a real-time position control scheme based on the synergistic combination of a recurrent neural network, an integral sliding mode controller and a bias controller for a rugged electrohydraulic actuation system. The controller design is based on recurrent Hermite neural network comprising a single hidden layer with orthonormal Hermite polynomial basis functions as activation functions for each hidden neuron and an integral sliding surface as the input. The bias controller is designed as a hyperbolic tangent of the error. Additionally, an adaptive scheme has been formulated based on the Lyapunov criterion and its convergence has been established. The performance of the proposed scheme has been evaluated on a laboratory scale single-rod electrohydraulic actuation system with a large dead band ( ∼ 10%) proportional valve in real-time. The experimental results suggest a significant improvement in the position tracking performance of the system for conventional tracking trajectories compared to other established methodologies.
中文翻译:

基于递归 Hermite 神经网络的鲁棒电液系统运动自适应神经偏置滑模控制
摘要 本文讨论了基于递归神经网络、积分滑模控制器和偏置控制器的协同组合的实时位置控制方案的设计和实现,用于坚固的电液驱动系统。控制器设计基于递归 Hermite 神经网络,该网络包含单个隐藏层,具有正交 Hermite 多项式基函数作为每个隐藏神经元的激活函数,以及作为输入的积分滑动面。偏置控制器被设计为误差的双曲正切。此外,基于李雅普诺夫准则制定了自适应方案并建立了其收敛性。已在具有大死区(~10%)比例阀的实验室规模单杆电液驱动系统上实时评估了所提出方案的性能。实验结果表明,与其他已建立的方法相比,系统对传统跟踪轨迹的位置跟踪性能有了显着改善。
更新日期:2020-10-01
中文翻译:
基于递归 Hermite 神经网络的鲁棒电液系统运动自适应神经偏置滑模控制
摘要 本文讨论了基于递归神经网络、积分滑模控制器和偏置控制器的协同组合的实时位置控制方案的设计和实现,用于坚固的电液驱动系统。控制器设计基于递归 Hermite 神经网络,该网络包含单个隐藏层,具有正交 Hermite 多项式基函数作为每个隐藏神经元的激活函数,以及作为输入的积分滑动面。偏置控制器被设计为误差的双曲正切。此外,基于李雅普诺夫准则制定了自适应方案并建立了其收敛性。已在具有大死区(~10%)比例阀的实验室规模单杆电液驱动系统上实时评估了所提出方案的性能。实验结果表明,与其他已建立的方法相比,系统对传统跟踪轨迹的位置跟踪性能有了显着改善。










































 京公网安备 11010802027423号
京公网安备 11010802027423号