当前位置:
X-MOL 学术
›
Comput. Electr. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Adaptive position control of a cart moved by a DC motor using integral controller tuned by Jaya optimization with Balloon effect
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-10-01 , DOI: 10.1016/j.compeleceng.2020.106786 Tarek Hassan Mohamed , Mohamed Abdelhamid Mohamed Alamin , Ammar M. Hassan
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-10-01 , DOI: 10.1016/j.compeleceng.2020.106786 Tarek Hassan Mohamed , Mohamed Abdelhamid Mohamed Alamin , Ammar M. Hassan
|
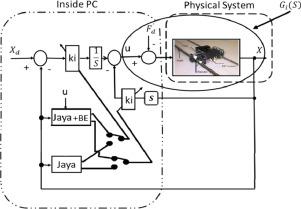
Abstract This study suggests an adaptive linear position control of a car moved by an armature-controlled DC motor. In this study, Jaya optimization algorithm supported by Balloon effect (BE) is used to tune the parameters of the controller of the car position. BE is introduced to improve response of the classical Jaya algorithm in face of the external disturbance and system parameters changes. In the suggested technique, an objective function (OF) of the modified Jaya depends on the updated values of the controller gains and identified value of the motor open loop transfer function. System with the suggested controller has been evaluated in case of step load disturbance and motor parameters changes. Simulation and experimental results supported that suggested adaptive controller using modified Jaya improved the total system performance at moments of load disturbance and uncertainties of system parameters.
中文翻译:

使用由带有气球效应的 Jaya 优化调整的积分控制器,对由直流电机移动的推车进行自适应位置控制
摘要 本研究建议对由电枢控制的直流电机驱动的汽车进行自适应线性位置控制。本研究采用气球效应(BE)支持的Jaya优化算法对轿厢位置控制器参数进行微调。引入 BE 是为了提高经典 Jaya 算法在面对外部扰动和系统参数变化时的响应。在建议的技术中,修改后的 Jaya 的目标函数 (OF) 取决于控制器增益的更新值和电机开环传递函数的识别值。在阶跃负载扰动和电机参数变化的情况下,已对带有建议控制器的系统进行了评估。
更新日期:2020-10-01
中文翻译:
使用由带有气球效应的 Jaya 优化调整的积分控制器,对由直流电机移动的推车进行自适应位置控制
摘要 本研究建议对由电枢控制的直流电机驱动的汽车进行自适应线性位置控制。本研究采用气球效应(BE)支持的Jaya优化算法对轿厢位置控制器参数进行微调。引入 BE 是为了提高经典 Jaya 算法在面对外部扰动和系统参数变化时的响应。在建议的技术中,修改后的 Jaya 的目标函数 (OF) 取决于控制器增益的更新值和电机开环传递函数的识别值。在阶跃负载扰动和电机参数变化的情况下,已对带有建议控制器的系统进行了评估。










































 京公网安备 11010802027423号
京公网安备 11010802027423号