当前位置:
X-MOL 学术
›
Comput. Electr. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Robust adaptive integral terminal sliding mode control for steer-by-wire systems based on extreme learning machine
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.compeleceng.2020.106756 Mao Ye , Hai Wang
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.compeleceng.2020.106756 Mao Ye , Hai Wang
|
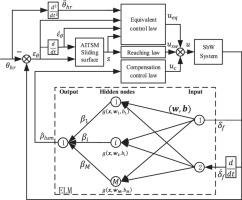
Abstract In this paper, a novel extreme-learning-machine (ELM)-based robust adaptive integral terminal sliding mode (AITSM) control strategy is developed for the precise tracking control of a steer-by-wire (SBW) system with uncertain dynamics. The proposed control not only ensures the finite-time error convergence but also effectively estimates the lumped uncertainty via a single-hidden layer feedforward network (SLFN) with ELM. Different from conventional ELM using least square optimization approach, the ELM in this work is designed to adaptively estimate the lumped uncertainty from the perspective of global stability of the closed-loop system. The stability of the closed-loop control system is proved in Lyapunov sense. Simulations are carried out to demonstrate the superior control performance of the proposed control.
中文翻译:

基于极限学习机的线控转向系统鲁棒自适应积分终端滑模控制
摘要 在本文中,一种新的基于极限学习机 (ELM) 的鲁棒自适应积分终端滑模 (AITSM) 控制策略被开发用于具有不确定动力学的线控转向 (SBW) 系统的精确跟踪控制。所提出的控制不仅确保有限时间误差收敛,而且还通过带有 ELM 的单隐藏层前馈网络 (SLFN) 有效地估计集总不确定性。与使用最小二乘优化方法的传统 ELM 不同,本工作中的 ELM 旨在从闭环系统的全局稳定性的角度自适应地估计集总不确定性。在李雅普诺夫意义上证明了闭环控制系统的稳定性。进行仿真以证明所提出的控制的优越控制性能。
更新日期:2020-09-01
中文翻译:
基于极限学习机的线控转向系统鲁棒自适应积分终端滑模控制
摘要 在本文中,一种新的基于极限学习机 (ELM) 的鲁棒自适应积分终端滑模 (AITSM) 控制策略被开发用于具有不确定动力学的线控转向 (SBW) 系统的精确跟踪控制。所提出的控制不仅确保有限时间误差收敛,而且还通过带有 ELM 的单隐藏层前馈网络 (SLFN) 有效地估计集总不确定性。与使用最小二乘优化方法的传统 ELM 不同,本工作中的 ELM 旨在从闭环系统的全局稳定性的角度自适应地估计集总不确定性。在李雅普诺夫意义上证明了闭环控制系统的稳定性。进行仿真以证明所提出的控制的优越控制性能。








































 京公网安备 11010802027423号
京公网安备 11010802027423号