Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2020-07-02 , DOI: 10.1016/j.sna.2020.112188 Igor Ruvinov , Nima Zamani , Norman Y. Zhou , Mohammad Ibraheem Khan
|
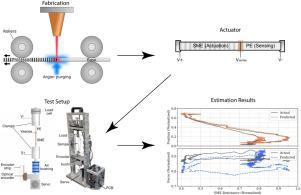
The current paper is a continuation of Part I, performing position and force estimation on a similar monolithic shape memory alloy (SMA) actuator with two distinct phases embedded through laser processing and post-processing. The recurrent neural network-based model proposed in this work outperforms the mathematical model developed in Part I, achieving average position and force estimation accuracy of 97.5% and 95.0%, respectively, using only electrical resistance measurements across the two actuator phases. Furthermore, the model can be applied to SMAs with varying compositions and geometries. The described actuator and sensorless estimation model are widely suitable for robotics, haptics, and various other systems which involve the application of unknown or dynamic load.
中文翻译:
新型激光加工形状记忆合金致动器设计,具有使用双电阻测量的嵌入式应变计传感器。第二部分:基于递归神经网络的位置和力估计
本文是第I部分的续篇,它是对类似的整体形状记忆合金(SMA)执行器进行位置和力估算,该执行器具有通过激光加工和后加工嵌入的两个不同的相。在这项工作中提出的基于递归神经网络的模型优于在第一部分中开发的数学模型,仅使用两个执行器相之间的电阻测量值,平均位置和力估计精度分别达到97.5%和95.0%。此外,该模型可以应用于具有不同成分和几何形状的SMA。所描述的致动器和无传感器估计模型广泛适用于涉及未知或动态负载应用的机器人技术,触觉技术和各种其他系统。










































 京公网安备 11010802027423号
京公网安备 11010802027423号