当前位置:
X-MOL 学术
›
Mater. Des.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Magnet-induced deformation enhanced adhesion based on magneto-responsive polymer: Theoretical analysis and experimental verification
Materials & Design ( IF 7.6 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.matdes.2020.108905 Rui Li , Qipeng Xiao , Ping-an Yang , Hao Wang , Lin Liu
Materials & Design ( IF 7.6 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.matdes.2020.108905 Rui Li , Qipeng Xiao , Ping-an Yang , Hao Wang , Lin Liu
|
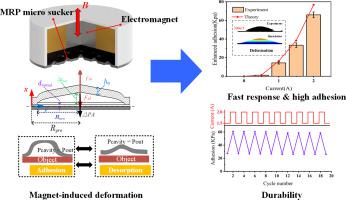
Abstract A reliable and fast switchable adhesive mode is very important in smart climbing robots, medical adhesives, industrial assembly and manipulation systems. However, the flaws in adhesion strength and operability provided by existing methods have long been a knotty problem. Here, by combining octopus inspired sucker and magnet-induced deformation, a magnet-induced deformation enhanced adhesion device (MED) based on magneto-responsive polymer (MRP) was proposed. Reversible adhesion was achieved by switching magnetic fields. Theories and simulations show that geometric size, magnetic field strength, and content of the filling particles all significantly affect the magnet-induced deformation and the enhanced adhesion. Adhesion experiments demonstrate d that for the device with 26.7 vol% Neodymium‑iron‑boron (NdFeB) particles, the enhanced adhesion could reach 65.94 KPa within seconds when the experimental current was 2 A. These results indicated a good durability and responsiveness, which is in agreement with theory. This design provided an inspiration to develop adhesion technology in complex real-world scenarios by applying MRP and other smart materials.
中文翻译:

基于磁响应聚合物的磁致变形增强粘附:理论分析与实验验证
摘要 在智能攀爬机器人、医用胶粘剂、工业装配和操纵系统中,可靠且快速可切换的胶粘模式非常重要。然而,现有方法在粘合强度和可操作性方面的缺陷长期以来一直是一个棘手的问题。在这里,通过结合章鱼启发吸盘和磁致变形,提出了一种基于磁响应聚合物(MRP)的磁致变形增强粘附装置(MED)。通过切换磁场实现可逆粘附。理论和模拟表明,几何尺寸、磁场强度和填充颗粒的含量都显着影响磁致变形和增强的附着力。粘附实验证明 d 对于具有 26.7 vol% 钕铁硼 (NdFeB) 颗粒的器件,当实验电流为2A时,增强的附着力可在数秒内达到65.94KPa。这些结果表明具有良好的耐久性和响应性,与理论一致。该设计为通过应用 MRP 和其他智能材料在复杂的现实世界场景中开发粘合技术提供了灵感。
更新日期:2020-09-01
中文翻译:
基于磁响应聚合物的磁致变形增强粘附:理论分析与实验验证
摘要 在智能攀爬机器人、医用胶粘剂、工业装配和操纵系统中,可靠且快速可切换的胶粘模式非常重要。然而,现有方法在粘合强度和可操作性方面的缺陷长期以来一直是一个棘手的问题。在这里,通过结合章鱼启发吸盘和磁致变形,提出了一种基于磁响应聚合物(MRP)的磁致变形增强粘附装置(MED)。通过切换磁场实现可逆粘附。理论和模拟表明,几何尺寸、磁场强度和填充颗粒的含量都显着影响磁致变形和增强的附着力。粘附实验证明 d 对于具有 26.7 vol% 钕铁硼 (NdFeB) 颗粒的器件,当实验电流为2A时,增强的附着力可在数秒内达到65.94KPa。这些结果表明具有良好的耐久性和响应性,与理论一致。该设计为通过应用 MRP 和其他智能材料在复杂的现实世界场景中开发粘合技术提供了灵感。










































 京公网安备 11010802027423号
京公网安备 11010802027423号