Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2020-06-29 , DOI: 10.1016/j.sna.2020.112181 Chong Li , Haoran Wen , Hua Chen , Farrokh Ayazi
|
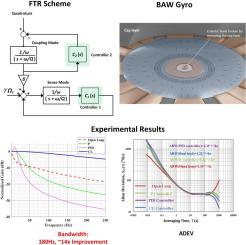
This paper presents a digital force-to-rebalance (FTR) control system to substantially extend the bandwidth of high-Q mode-matched high-frequency micro-electro-mechanical systems (MEMS) bulk-acoustic-wave (BAW) gyroscopes. Principle and challenges for the FTR operation of high-frequency mode-matched MEMS gyroscopes are studied and a digital implementation is demonstrated based on high speed field programmable gate arrays (FPGA) using a 4.2 MHz silicon BAW gyroscope with a Q of 144,000. By using a properly designed cascaded lead controller, the bandwidth of the mode-matched gyroscope is extended from 14 Hz to 180 Hz with no degradation in angle random walk (ARW) and an improved long-term bias stability, which will allow high-Q mode-matched gyroscopes to be used for advanced high-bandwidth high-dynamic-range applications.
中文翻译:
高频体声波微型陀螺仪的数字力平衡法
本文提出了一种数字力重平衡(FTR)控制系统,以大幅扩展高Q模式匹配的高频微机电系统(MEMS)体声波(BAW)陀螺仪的带宽。研究了高频模式匹配的MEMS陀螺仪FTR操作的原理和挑战,并演示了基于高速现场可编程门阵列(FPGA)的数字实现,该器件使用4.2 MHz硅BAW陀螺仪,Q为144,000。通过使用正确设计的级联引线控制器,模式匹配的陀螺仪的带宽从14 Hz扩展到180 Hz,并且不会降低角度随机游走(ARW)并改善了长期偏置稳定性,这将实现高Q模式匹配的陀螺仪将用于高级高带宽高动态范围应用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号