当前位置:
X-MOL 学术
›
Phys. Rev. Fluids
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Flow transitions and mapping for undulating swimmers
Physical Review Fluids ( IF 2.7 ) Pub Date : 2020-06-24 , DOI: 10.1103/physrevfluids.5.063104 Muhammad Saif Ullah Khalid , Junshi Wang , Haibo Dong , Moubin Liu
Physical Review Fluids ( IF 2.7 ) Pub Date : 2020-06-24 , DOI: 10.1103/physrevfluids.5.063104 Muhammad Saif Ullah Khalid , Junshi Wang , Haibo Dong , Moubin Liu
|
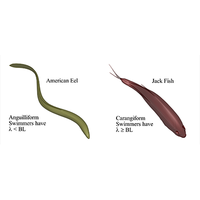
Natural swimmers usually perform undulations to propel themselves and perform a range of maneuvers. These include various biological species ranging from microsized organisms to large-sized fish that undulate at typical kinematic patterns. In this paper, we consider anguilliform and carangiform swimming modes to perform numerical simulations using an immersed-boundary method based computational solver at various Reynolds number (Re) regimes. We carry out thorough studies using wavelength and Strouhal frequency as the governing parameters for the hydrodynamic performance of undulating swimmers. Our analysis shows that the anguilliform kinematics achieves better hydrodynamic efficiency for viscous flow regime, whereas for flows with higher Re, the wavelength of a swimmer's wavy motion dictates which kinematics will outperform the other. We find that the constructive interference between vortices produced at anterior parts of the bodies and corotating vortices present at the posterior parts plays an important role in reversing the direction of Benard–von Karman vortex street. Since most of the thrust producing conditions appear to cause wake deflection; a critical factor responsible for degrading the hydrodynamic efficiency of a swimmer, we discuss the underlying mechanics that would trigger this phenomenon. Moreover, we also find that resistive thrust force due to the frictional drag for anguilliform swimmers plays a substantial role in their propulsion at a low Reynolds number. As we approach more inertial flow conditions, its role is minimum and our carangiform swimmers primarily takes advantage of the thrust force due to the added mass effect under all the flow and kinematic conditions. Our findings are expected to provide a guideline on their selection for bioinspired underwater vehicles.
中文翻译:

波动游泳者的流量转换和映射
天生的游泳者通常会起伏以推动自己并进行一系列的动作。这些包括各种生物物种,从微型生物到以典型运动学模式起伏的大型鱼类。在本文中,我们考虑在不同的雷诺数(Re)体制下,使用浸入边界方法的计算求解器,以anguilliform和carangiform游泳模式进行数值模拟。我们进行了深入研究,使用波长和Strouhal频率作为起伏游泳者水动力性能的控制参数。我们的分析表明,对于粘性流动状态,an形运动学具有更好的流体动力学效率,而对于具有较高Re的流动,游泳者波浪运动的波长决定了哪种运动学将优于其他运动学。我们发现,在身体前部产生的涡流与在后部出现的同向涡流之间的建设性干涉在反转Benard-von Karman涡街的方向上起着重要作用。由于大多数推力产生条件似乎导致尾流偏斜;作为降低游泳者水动力效率的关键因素,我们讨论了触发这种现象的潜在机理。此外,我们还发现,对于无角形游泳者而言,由于摩擦阻力而产生的阻力推力在其低雷诺数的推进中起着重要作用。随着我们接近更多的惯性流动条件,它的作用是最小的,由于在所有流动和运动条件下都增加了质量效应,因此我们的carangiform游泳者主要利用推力。我们的发现有望为生物启发式水下航行器的选择提供指导。
更新日期:2020-06-25
中文翻译:
波动游泳者的流量转换和映射
天生的游泳者通常会起伏以推动自己并进行一系列的动作。这些包括各种生物物种,从微型生物到以典型运动学模式起伏的大型鱼类。在本文中,我们考虑在不同的雷诺数(Re)体制下,使用浸入边界方法的计算求解器,以anguilliform和carangiform游泳模式进行数值模拟。我们进行了深入研究,使用波长和Strouhal频率作为起伏游泳者水动力性能的控制参数。我们的分析表明,对于粘性流动状态,an形运动学具有更好的流体动力学效率,而对于具有较高Re的流动,游泳者波浪运动的波长决定了哪种运动学将优于其他运动学。我们发现,在身体前部产生的涡流与在后部出现的同向涡流之间的建设性干涉在反转Benard-von Karman涡街的方向上起着重要作用。由于大多数推力产生条件似乎导致尾流偏斜;作为降低游泳者水动力效率的关键因素,我们讨论了触发这种现象的潜在机理。此外,我们还发现,对于无角形游泳者而言,由于摩擦阻力而产生的阻力推力在其低雷诺数的推进中起着重要作用。随着我们接近更多的惯性流动条件,它的作用是最小的,由于在所有流动和运动条件下都增加了质量效应,因此我们的carangiform游泳者主要利用推力。我们的发现有望为生物启发式水下航行器的选择提供指导。


























 京公网安备 11010802027423号
京公网安备 11010802027423号