当前位置:
X-MOL 学术
›
Faraday Discuss.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Autoperforation of two-dimensional materials to generate colloidal state machines capable of locomotion
Faraday Discussions ( IF 3.3 ) Pub Date : 2020-6-11 , DOI: 10.1039/d0fd00030b Albert Tianxiang Liu 1 , Jing Fan Yang , Lexy N LeMar , Ge Zhang , Ana Pervan , Todd D Murphey , Michael S Strano
Faraday Discussions ( IF 3.3 ) Pub Date : 2020-6-11 , DOI: 10.1039/d0fd00030b Albert Tianxiang Liu 1 , Jing Fan Yang , Lexy N LeMar , Ge Zhang , Ana Pervan , Todd D Murphey , Michael S Strano
Affiliation
|
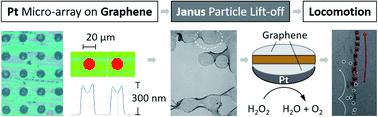
A central ambition of the robotics field has been to increasingly miniaturize such systems, with perhaps the ultimate achievement being the synthetic microbe or cell sized machine. To this end, we have introduced and demonstrated prototypes of what we call colloidal state machines (CSMs) as particulate devices capable of integrating sensing, memory, and energy harvesting as well as other functions onto a single particle. One technique that we have introduced for creating CSMs based on 2D materials such as graphene or monolayer MoS2 is “autoperforation”, where the nanometer-scale film is fractured around a designed strain field to produce structured particles upon liftoff. While CSMs have been demonstrated with functions such as memory, sensing, and energy harvesting, the property of locomotion has not yet been demonstrated. In this work, we introduce an inversion moulding technique compatible with autoperforation that allows for the patterning of an external catalytic surface that enables locomotion in an accompanying fuel bath. Optimal processing conditions for electroplating a catalytic Pt layer to one side of an autoperforated CSM are elucidated. The self-driven propulsion of the resulting Janus CSM in H2O2 is studied, including the average velocity, as a function of fluid surface tension and H2O2 concentration in the bath. Since machines have to encode for a specific task, this work summarizes efforts to create a microfluidic testbed that allows for CSM designs to be evaluated for the ultimate purpose of navigation through complex fluidic networks, such as the human circulatory system. We introduce two CSM designs that mimic aspects of human immunity to solve search and recruitment tasks in such environments. These results advance CSM design concepts closer to promising applications in medicine and other areas.
中文翻译:

二维材料的自动穿孔以产生能够运动的胶体状态机
机器人领域的一个核心目标是使此类系统越来越小型化,最终的成就可能是合成微生物或细胞大小的机器。为此,我们引入并展示了我们称之为胶体状态机 (CSM) 的原型,它是一种能够将传感、记忆和能量收集以及其他功能集成到单个粒子上的微粒设备。我们介绍了一种基于二维材料(如石墨烯或单层 MoS 2 )创建 CSM 的技术是“自动穿孔”,其中纳米级薄膜在设计的应变场周围破裂,以在升空时产生结构化颗粒。虽然 CSM 已被证明具有记忆、传感和能量收集等功能,但运动的特性尚未得到证明。在这项工作中,我们介绍了一种与自动穿孔兼容的反转成型技术,该技术允许对外部催化表面进行图案化,从而能够在伴随的燃料浴中移动。阐明了将催化 Pt 层电镀到自穿孔 CSM 一侧的最佳工艺条件。研究了生成的 Janus CSM 在 H 2 O 2中的自驱动推进,包括平均速度,作为流体表面张力和 H 2的函数浴中的O 2浓度。由于机器必须针对特定任务进行编码,因此这项工作总结了创建微流体测试平台的努力,该测试平台允许评估 CSM 设计,以实现通过复杂流体网络(例如人体循环系统)导航的最终目的。我们介绍了两种模拟人类免疫方面的 CSM 设计,以解决此类环境中的搜索和招聘任务。这些结果使 CSM 设计概念更接近于医学和其他领域的有希望的应用。
更新日期:2020-06-11
中文翻译:
二维材料的自动穿孔以产生能够运动的胶体状态机
机器人领域的一个核心目标是使此类系统越来越小型化,最终的成就可能是合成微生物或细胞大小的机器。为此,我们引入并展示了我们称之为胶体状态机 (CSM) 的原型,它是一种能够将传感、记忆和能量收集以及其他功能集成到单个粒子上的微粒设备。我们介绍了一种基于二维材料(如石墨烯或单层 MoS 2 )创建 CSM 的技术是“自动穿孔”,其中纳米级薄膜在设计的应变场周围破裂,以在升空时产生结构化颗粒。虽然 CSM 已被证明具有记忆、传感和能量收集等功能,但运动的特性尚未得到证明。在这项工作中,我们介绍了一种与自动穿孔兼容的反转成型技术,该技术允许对外部催化表面进行图案化,从而能够在伴随的燃料浴中移动。阐明了将催化 Pt 层电镀到自穿孔 CSM 一侧的最佳工艺条件。研究了生成的 Janus CSM 在 H 2 O 2中的自驱动推进,包括平均速度,作为流体表面张力和 H 2的函数浴中的O 2浓度。由于机器必须针对特定任务进行编码,因此这项工作总结了创建微流体测试平台的努力,该测试平台允许评估 CSM 设计,以实现通过复杂流体网络(例如人体循环系统)导航的最终目的。我们介绍了两种模拟人类免疫方面的 CSM 设计,以解决此类环境中的搜索和招聘任务。这些结果使 CSM 设计概念更接近于医学和其他领域的有希望的应用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号