European Journal of Control ( IF 2.5 ) Pub Date : 2020-06-12 , DOI: 10.1016/j.ejcon.2020.06.003 Rie B. Larsen , Bilge Atasoy , Rudy R. Negenborn
|
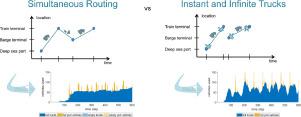
Transport of containers on a-modal bookings enables transport suppliers to route the containers in accordance with the current state of the synchromodal transport network. At the same time, it enables the transport providers to route their vehicles in real time based on the current need for transportation. The interdependency of the routes of containers and of vehicles has not yet been discussed explicitly in the synchromodal literature. This paper presents a model predictive controller that determines which combination of trucks, trains, and ships to use for transporting the containers and what routes empty and full trucks should use as one integrated problem. The impacts of this integrated problem as opposed to only considering the routes of the containers are shown with experiments on a simulated synchromodal hinterland network performed with both the proposed method and with a method that solely routes the containers. The results indicate an improved vehicle utilization. Furthermore, the integrated problem approach allows for more realistic constraints and costs.
中文翻译:
集装箱和车辆路线同时规划的模型预测控制
以a-modal预订运输集装箱使运输供应商能够根据同步运输网络的当前状态对集装箱进行运输。同时,它使运输服务提供商能够根据当前的运输需求实时地对他们的车辆进行路线选择。集装箱和车辆路线的相互依赖性尚未在同步模式文献中明确讨论。本文提出了一种模型预测控制器,该控制器确定要使用哪种卡车,火车和轮船组合来运输集装箱,以及空卡车和满卡车应采用的路线是一个综合问题。与在仅考虑了集装箱路线的情况下相反的综合问题的影响,通过在拟议的方法和仅对集装箱进行路线选择的方法进行的模拟同步模态腹地网络上的实验进行了展示。结果表明提高了车辆利用率。此外,综合问题方法允许更现实的约束和成本。










































 京公网安备 11010802027423号
京公网安备 11010802027423号