Applied Materials Today ( IF 7.2 ) Pub Date : 2020-06-10 , DOI: 10.1016/j.apmt.2020.100621 R. Wu , K.W. Kwan , W. Ma , P. Wang , A.H.W. Ngan
|
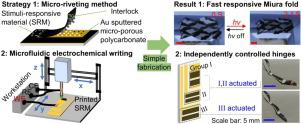
Flexible origami structures can mimic the complicated motions of small creatures that are otherwise difficult to be achieved by rigid robots with limited degree of motion freedom. However, actuating origami structures in a compact and self-contained way has been a critical challenge. Here, we demonstrate a versatile approach of actuating origami micro-robots by printed self-folding creases made of a type of stimuli-responsive transition metal hydroxides/oxides that can undergo large actuation under electrochemical or light stimulations. Two enabling technologies are pivotal: (i) a microfluidic electrochemical writing method to selectively print the stimuli-responsive material (SRM) at the actuating creases to enable them to self-fold independently “on demand”, and (ii) a micro-scale riveting method to provide strong adhesion of the SRM on the origami body. Such strategies allow the successful construction of actuating creases made from different stimuli-responsive transition metal hydroxides/oxides that can self-fold into curvature exceeding 1 mm−1 under low-intensity visible-light stimulation in ambient conditions, or low-potential electrochemical stimulation in electrolytic environments, with response time as fast as in seconds. Based on the high performance of such active creases, complex miniaturized origami designs powered by hinges activated in an independently controllable way are demonstrated, including self-folding Miura and a full micro-robotic hand with independently programmable finger joints. These results prove a new, versatile paradigm for robotics, where a transferrable approach is applicable to design and fabricate a wide variety of customizable micro-robots with compact construction and complex motions using different stimuli-responsive ceramic-based materials.
中文翻译:
通过独立可打印和可控制的刺激响应折痕实现自我驱动的折纸
灵活的折纸结构可以模仿小动物的复杂运动,而僵化的机器人在运动自由度有限的情况下很难做到这一点。然而,以紧凑且自成一体的方式致动折纸结构一直是关键的挑战。在这里,我们演示了一种通过印刷自折叠折痕来激活折纸微型机器人的通用方法,该折痕是由一种刺激响应型过渡金属氢氧化物/氧化物制成的,可以在电化学或光刺激下进行大幅度的激活。两项启用技术至关重要:(i)一种微流体电化学写入方法,用于选择性地在激励折痕处打印刺激响应材料(SRM),以使其能够“按需”独立地自动折叠,(ii)微型铆接方法,可将SRM牢固地粘合在折纸身上。这样的策略可以成功构造由不同的刺激响应性过渡金属氢氧化物/氧化物制成的致动折痕,它们可以自折叠成超过1 mm的曲率-1在环境条件下在低强度可见光刺激下,或在电解环境下在低电位电化学刺激下,响应时间快至数秒。基于这种活动折痕的高性能,展示了由以独立可控方式激活的铰链驱动的复杂小型折纸设计,包括三浦自动折叠和具有可独立编程的手指关节的微型手。这些结果证明了一种适用于机器人的新型通用范式,其中可转移的方法适用于设计和制造各种可定制的微型机器人,这些微型机器人具有紧凑的结构和复杂的动作,并使用不同的基于陶瓷的刺激材料。










































 京公网安备 11010802027423号
京公网安备 11010802027423号