当前位置:
X-MOL 学术
›
Control Eng. Pract.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Tube-based nonlinear model predictive control for autonomous skid-steer mobile robots with tire–terrain interactions
Control Engineering Practice ( IF 4.9 ) Pub Date : 2020-08-01 , DOI: 10.1016/j.conengprac.2020.104451 Álvaro Javier Prado , Miguel Torres-Torriti , Juan Yuz , Fernando Auat Cheein
Control Engineering Practice ( IF 4.9 ) Pub Date : 2020-08-01 , DOI: 10.1016/j.conengprac.2020.104451 Álvaro Javier Prado , Miguel Torres-Torriti , Juan Yuz , Fernando Auat Cheein
|
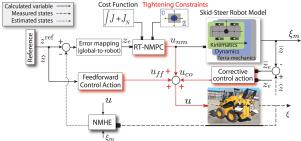
Abstract This work addresses the problem of robust tracking control for skid-steer mobile platforms, using tube-based Nonlinear Model Predictive Control. The strategy seeks to mitigate the impact of disturbances propagated to autonomous vehicles originated by traction losses. To this end, a dynamical model composed by two coupled sub-systems stands for lateral and longitudinal vehicle dynamics and tire behavior. The controller is aimed at tracking prescribed stable operation points of the slip and side-slip beyond the robot pose and speeds. To reach robust tracking performance on the global system, a centralized control scheme operates under a predictive control framework composed by three control actions. The first one compensates for disturbances using the reference trajectory-feedforward control. The second control action corrects the errors generated by the modeling mismatch. The third one is devoted to ensure robustness on the closed-loop system whilst compensating for deviations of the state trajectories from the nominal ones (i.e. disturbance-free). The strategy ensures robust feasibility even when tightening constraints are met. Such constraints are calculated on-line based on robust positively invariant sets characterized by polytopic sets (tubes), including a terminal region to guarantee robustness. The benefits of the controller regarding tracking performance, constraint satisfaction and computational practicability were tested through simulations with a Cat® 262C skid-steer model. Then, in field tests, the controller evidenced high tracking accuracy against terrain disturbances when benchmarking performance with respect to inherent robust predictive controllers.
中文翻译:

具有轮胎-地形相互作用的自主滑移移动机器人的基于管的非线性模型预测控制
摘要 这项工作使用基于管的非线性模型预测控制解决了滑移移动平台的鲁棒跟踪控制问题。该策略旨在减轻因牵引力损失而传播到自动驾驶汽车的干扰的影响。为此,由两个耦合子系统组成的动力学模型代表横向和纵向车辆动力学和轮胎行为。控制器旨在跟踪超出机器人位姿和速度的滑移和侧滑的规定稳定运行点。为了在全局系统上实现稳健的跟踪性能,集中控制方案在由三个控制动作组成的预测控制框架下运行。第一个使用参考轨迹前馈控制来补偿干扰。第二个控制动作纠正由建模不匹配产生的错误。第三个致力于确保闭环系统的鲁棒性,同时补偿状态轨迹与标称轨迹的偏差(即无干扰)。即使在满足收紧约束的情况下,该策略也能确保稳健的可行性。这些约束是基于以多面体集(管)为特征的鲁棒正不变集在线计算的,包括一个终端区域以保证鲁棒性。通过使用 Cat® 262C 滑移转向模型进行模拟,测试了控制器在跟踪性能、约束满足度和计算实用性方面的优势。然后,在现场测试中,
更新日期:2020-08-01
中文翻译:
具有轮胎-地形相互作用的自主滑移移动机器人的基于管的非线性模型预测控制
摘要 这项工作使用基于管的非线性模型预测控制解决了滑移移动平台的鲁棒跟踪控制问题。该策略旨在减轻因牵引力损失而传播到自动驾驶汽车的干扰的影响。为此,由两个耦合子系统组成的动力学模型代表横向和纵向车辆动力学和轮胎行为。控制器旨在跟踪超出机器人位姿和速度的滑移和侧滑的规定稳定运行点。为了在全局系统上实现稳健的跟踪性能,集中控制方案在由三个控制动作组成的预测控制框架下运行。第一个使用参考轨迹前馈控制来补偿干扰。第二个控制动作纠正由建模不匹配产生的错误。第三个致力于确保闭环系统的鲁棒性,同时补偿状态轨迹与标称轨迹的偏差(即无干扰)。即使在满足收紧约束的情况下,该策略也能确保稳健的可行性。这些约束是基于以多面体集(管)为特征的鲁棒正不变集在线计算的,包括一个终端区域以保证鲁棒性。通过使用 Cat® 262C 滑移转向模型进行模拟,测试了控制器在跟踪性能、约束满足度和计算实用性方面的优势。然后,在现场测试中,


























 京公网安备 11010802027423号
京公网安备 11010802027423号