当前位置:
X-MOL 学术
›
J. Process Control
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
The integration of scheduling and control: Top-down vs. bottom-up
Journal of Process Control ( IF 3.3 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.jprocont.2020.05.008 Adrian Caspari , Calvin Tsay , Adel Mhamdi , Michael Baldea , Alexander Mitsos
Journal of Process Control ( IF 3.3 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.jprocont.2020.05.008 Adrian Caspari , Calvin Tsay , Adel Mhamdi , Michael Baldea , Alexander Mitsos
|
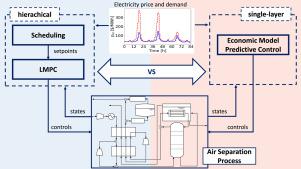
Abstract The flexible operation of continuous processes often requires the integration of scheduling and control. This can be achieved by top-down or bottom-up approaches. We compare the two paradigms in-silico using an air separation unit as a benchmark process. To demonstrate the top-down paradigm, we identify data-driven models of the closed-loop process dynamics based on a mechanistic model and use them in scheduling calculations that are performed offline. The resulting target trajectories are passed to a linear model predictive control (LMPC) system and implemented in the process. To demonstrate the bottom-up paradigm, we define an economic nonlinear model predictive control (eNMPC) scheme, which performs dynamic optimization using the full model in closed-loop to directly obtain the control variable profiles to be implemented in the process. We provide implementations of the process model equations as both a gPROMS and a Modelica model to encourage future comparison of approaches for flexible operation, process control, and/or handling disturbances. The performance, advantages, and disadvantages of the two strategies are analyzed using demand-response scenarios with varying levels of fluctuations in electricity prices, as well as considering the cases of known, instantaneous, and completely unknown load changes. The similarities and differences of the two approaches as relevant to flexible operation of continuous processes are discussed. Integrated scheduling and control leverages existing infrastructure and can be immediately applied to real operation tasks. Both operation strategies achieve successful process operation with remarkable economic improvements (up to 8%) compared to constant operation. eNMPC requires more computational resources, and is – at the moment – not implementable in real-time due to maximum optimization times exceeding the controller sampling time. However, eNMPC achieves up to 2.5 times higher operating cost savings compared to the top-down approach, owing in part to the more accurate modeling of key process dynamics.
中文翻译:

调度与控制的整合:自上而下 vs. 自下而上
摘要 连续过程的灵活运行往往需要调度与控制的集成。这可以通过自上而下或自下而上的方法来实现。我们使用空气分离装置作为基准过程在计算机上比较了两种范式。为了演示自上而下的范式,我们基于机械模型确定了闭环过程动力学的数据驱动模型,并将它们用于离线执行的调度计算。生成的目标轨迹被传递到线性模型预测控制 (LMPC) 系统并在此过程中实施。为了演示自下而上的范式,我们定义了一种经济非线性模型预测控制 (eNMPC) 方案,该方案在闭环中使用完整模型进行动态优化,以直接获得要在过程中实施的控制变量分布。我们将过程模型方程的实现提供为 gPROMS 和 Modelica 模型,以鼓励未来对灵活操作、过程控制和/或处理干扰的方法进行比较。使用具有不同电价波动水平的需求响应场景,并考虑已知、瞬时和完全未知的负载变化情况,分析了两种策略的性能、优缺点。讨论了与连续过程的灵活操作相关的两种方法的异同。集成调度和控制利用现有基础设施,可以立即应用于实际操作任务。与持续操作相比,两种操作策略都实现了成功的过程操作,并具有显着的经济改进(高达 8%)。eNMPC 需要更多的计算资源,并且由于最大优化时间超过了控制器采样时间,因此目前无法实时实现。然而,与自上而下的方法相比,eNMPC 实现了高达 2.5 倍的运营成本节约,部分原因在于对关键过程动力学的更准确建模。
更新日期:2020-07-01
中文翻译:
调度与控制的整合:自上而下 vs. 自下而上
摘要 连续过程的灵活运行往往需要调度与控制的集成。这可以通过自上而下或自下而上的方法来实现。我们使用空气分离装置作为基准过程在计算机上比较了两种范式。为了演示自上而下的范式,我们基于机械模型确定了闭环过程动力学的数据驱动模型,并将它们用于离线执行的调度计算。生成的目标轨迹被传递到线性模型预测控制 (LMPC) 系统并在此过程中实施。为了演示自下而上的范式,我们定义了一种经济非线性模型预测控制 (eNMPC) 方案,该方案在闭环中使用完整模型进行动态优化,以直接获得要在过程中实施的控制变量分布。我们将过程模型方程的实现提供为 gPROMS 和 Modelica 模型,以鼓励未来对灵活操作、过程控制和/或处理干扰的方法进行比较。使用具有不同电价波动水平的需求响应场景,并考虑已知、瞬时和完全未知的负载变化情况,分析了两种策略的性能、优缺点。讨论了与连续过程的灵活操作相关的两种方法的异同。集成调度和控制利用现有基础设施,可以立即应用于实际操作任务。与持续操作相比,两种操作策略都实现了成功的过程操作,并具有显着的经济改进(高达 8%)。eNMPC 需要更多的计算资源,并且由于最大优化时间超过了控制器采样时间,因此目前无法实时实现。然而,与自上而下的方法相比,eNMPC 实现了高达 2.5 倍的运营成本节约,部分原因在于对关键过程动力学的更准确建模。








































 京公网安备 11010802027423号
京公网安备 11010802027423号