当前位置:
X-MOL 学术
›
Comput. Electr. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
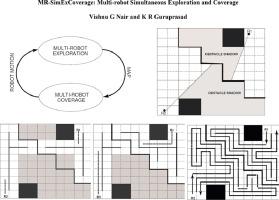
MR-SimExCoverage: Multi-robot Simultaneous Exploration and Coverage
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.compeleceng.2020.106680 Vishnu G Nair , K.R. Guruprasad
Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.compeleceng.2020.106680 Vishnu G Nair , K.R. Guruprasad
|
Abstract In this paper, we present a novel problem of simultaneous exploration and area coverage by multiple cooperating mobile robots. As the robots cover an initially unknown region, they perform intermittent exploration of the region and build a map, which in turn is used to plan the coverage path. We use a Voronoi partition based multi-robot coverage strategy using the Manhattan distance metric to solve the coverage problem and a frontier based exploration strategy for exploration mapping. We provide results of simulation using Matlab/V-rep environments to demonstrate the proposed multi-robot simultaneous exploration and coverage (MR-SimExCoverage) problem using the spanning tree based coverage (STC) algorithm.
中文翻译:

MR-SimExCoverage:多机器人同时探索和覆盖
摘要 在本文中,我们提出了多个协作移动机器人同时探索和区域覆盖的新问题。当机器人覆盖最初未知的区域时,它们会对该区域进行间歇性探索并构建一张地图,该地图又用于规划覆盖路径。我们使用基于 Voronoi 分区的多机器人覆盖策略使用曼哈顿距离度量来解决覆盖问题,并使用基于边界的探索策略进行探索映射。我们提供了使用 Matlab / V-rep 环境的模拟结果,以使用基于生成树的覆盖 (STC) 算法演示所提出的多机器人同时探索和覆盖 (MR-SimExCoverage) 问题。
更新日期:2020-07-01
中文翻译:
MR-SimExCoverage:多机器人同时探索和覆盖
摘要 在本文中,我们提出了多个协作移动机器人同时探索和区域覆盖的新问题。当机器人覆盖最初未知的区域时,它们会对该区域进行间歇性探索并构建一张地图,该地图又用于规划覆盖路径。我们使用基于 Voronoi 分区的多机器人覆盖策略使用曼哈顿距离度量来解决覆盖问题,并使用基于边界的探索策略进行探索映射。我们提供了使用 Matlab / V-rep 环境的模拟结果,以使用基于生成树的覆盖 (STC) 算法演示所提出的多机器人同时探索和覆盖 (MR-SimExCoverage) 问题。










































 京公网安备 11010802027423号
京公网安备 11010802027423号