当前位置:
X-MOL 学术
›
Comput. Graph.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Realistic haptic rendering of hyper-elastic material via measurement-based FEM model identification and real-time simulation
Computers & Graphics ( IF 2.5 ) Pub Date : 2020-06-01 , DOI: 10.1016/j.cag.2020.04.004 Arsen Abdulali , Ibragim R. Atadjanov , Seungkyu Lee , Seokhee Jeon
Computers & Graphics ( IF 2.5 ) Pub Date : 2020-06-01 , DOI: 10.1016/j.cag.2020.04.004 Arsen Abdulali , Ibragim R. Atadjanov , Seungkyu Lee , Seokhee Jeon
|
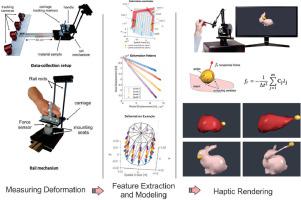
Abstract This paper presents a measurement-based FEM (finite element method) modeling and haptic rendering framework for objects with hyper-elastic deformation property. A complete set of methods covering the whole process of the measurement-based modeling/rendering paradigm is newly designed and implemented, with a special emphasis on haptic feedback realism. To this end, we first build a data collection setup that accurately captures shape deformation and response forces during compressive deformation of cylindrical material samples. With this setup, training and testing sets of data are collected from four silicone objects having various material profiles. Then, an objective function incorporating both shape deformation and reactive forces is designed and used to identify material parameters based on training data and the genetic algorithm. For real-time haptic rendering, an optimization-based FEM solver is adopted, ensuring around 500 Hz update rate. The whole procedure is evaluated through numerical and psychophysical experiments. The numerical rendering error is calculated based on the difference between simulated and actually measured deformation forces. The errors are also compared to the human perceptual threshold and found to be perceptually negligible. Overall realism of the feedback from the system is also assessed through the psychophysical experiment. A total of twelve participants rated similarity between real and modeled objects, and the results reveal the rendering quality to be at a reasonable level of realism with positive user feedback.
中文翻译:

通过基于测量的 FEM 模型识别和实时仿真对超弹性材料进行逼真的触觉渲染
摘要 本文提出了一种基于测量的 FEM(有限元方法)建模和触觉渲染框架,用于具有超弹性变形特性的物体。全新设计和实现了一套完整的方法,涵盖了基于测量的建模/渲染范式的整个过程,特别强调了触觉反馈的真实性。为此,我们首先建立了一个数据收集装置,可以准确地捕捉圆柱形材料样品在压缩变形过程中的形状变形和响应力。通过这种设置,训练和测试数据集是从具有不同材料轮廓的四个硅胶物体中收集的。然后,设计了一个结合了形状变形和反作用力的目标函数,用于根据训练数据和遗传算法识别材料参数。对于实时触觉渲染,采用基于优化的 FEM 求解器,确保大约 500 Hz 的更新速率。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。
更新日期:2020-06-01
中文翻译:
通过基于测量的 FEM 模型识别和实时仿真对超弹性材料进行逼真的触觉渲染
摘要 本文提出了一种基于测量的 FEM(有限元方法)建模和触觉渲染框架,用于具有超弹性变形特性的物体。全新设计和实现了一套完整的方法,涵盖了基于测量的建模/渲染范式的整个过程,特别强调了触觉反馈的真实性。为此,我们首先建立了一个数据收集装置,可以准确地捕捉圆柱形材料样品在压缩变形过程中的形状变形和响应力。通过这种设置,训练和测试数据集是从具有不同材料轮廓的四个硅胶物体中收集的。然后,设计了一个结合了形状变形和反作用力的目标函数,用于根据训练数据和遗传算法识别材料参数。对于实时触觉渲染,采用基于优化的 FEM 求解器,确保大约 500 Hz 的更新速率。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。整个过程通过数值和心理物理实验进行评估。数值渲染误差是根据模拟变形力和实际测量变形力之间的差异计算得出的。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。这些误差也与人类感知阈值进行了比较,发现在感知上可以忽略不计。系统反馈的整体真实性也通过心理物理实验进行评估。共有 12 名参与者对真实对象和建模对象之间的相似性进行了评分,结果显示渲染质量处于合理的真实度水平,并具有积极的用户反馈。










































 京公网安备 11010802027423号
京公网安备 11010802027423号