当前位置:
X-MOL 学术
›
Microelectron. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Fabrication and characterization of SMA film actuator array with bias spring for high-power MEMS tactile display
Microelectronic Engineering ( IF 2.6 ) Pub Date : 2020-04-01 , DOI: 10.1016/j.mee.2020.111307 Jiale Xu , Yusuke Kimura , Kazuki Tsuji , Konomu Abe , Tomomi Shimizu , Hiroyasu Hasegawa , Takashi Mineta
Microelectronic Engineering ( IF 2.6 ) Pub Date : 2020-04-01 , DOI: 10.1016/j.mee.2020.111307 Jiale Xu , Yusuke Kimura , Kazuki Tsuji , Konomu Abe , Tomomi Shimizu , Hiroyasu Hasegawa , Takashi Mineta
|
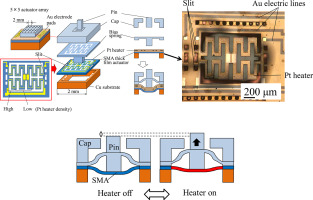
Abstract A MEMS-type SMA thick-film actuator (5 × 5 array) with a pitch of 2 mm was designed and fabricated for high-power vibrational stimuli to human skin. The deformable part (1.08 mm × 1.52 mm) of the SMA actuator was initially deformed to 320 μm to provide vibrational motion. The SMA actuator device was successfully fabricated without fractures in an SMA meandering actuator and microheater circuit when the SMA actuator was deflected to the initial displacement (320 μm). The surface temperature of the meandering-shaped SMA actuator successfully rose to about 65 °C, the shape recovery temperature, in a short time by high-pulse voltage heating (32 V) to the SMA. However, it was found that a cooling time longer than 99 ms was needed to completely cool down owing to poor heat conduction. Although the SMA actuator generated 38–40 mN of force by DC current heating (~72 mW), by periodic pulse-driving above 15 Hz, where human skin has high sensitivity, the generated force drastically decreased by 1/4 owing to a poor thermal response during the pulse-off time. The completed SMA tactile display with a bias-spring mechanism generated a displacement amplitude of 23 μm at a frequency of 1 Hz. However, the amplitude decreased to 10–13 μm at 15 Hz, which is slightly above the human perception limit
中文翻译:

用于大功率 MEMS 触觉显示器的带有偏置弹簧的 SMA 薄膜致动器阵列的制造和表征
摘要 设计并制造了间距为2 mm的MEMS型SMA厚膜致动器(5×5阵列),用于对人体皮肤进行大功率振动刺激。SMA 致动器的可变形部分 (1.08 mm × 1.52 mm) 最初变形为 320 μm 以提供振动运动。当 SMA 致动器偏转至初始位移 (320 μm) 时,SMA 致动器装置在 SMA 曲折致动器和微型加热器电路中成功制造而没有断裂。通过对 SMA 的高脉冲电压加热 (32 V),曲折形 SMA 致动器的表面温度在短时间内成功升至约 65 °C,即形状恢复温度。然而,发现由于热传导不良,需要超过 99 ms 的冷却时间才能完全冷却。尽管 SMA 执行器通过直流电流加热 (~72 mW) 产生了 38-40 mN 的力,但通过 15 Hz 以上的周期性脉冲驱动,人类皮肤具有很高的敏感性,但由于较差的性能,产生的力急剧下降了 1/4。脉冲关闭期间的热响应。带有偏置弹簧机构的完整 SMA 触觉显示器在 1 Hz 的频率下产生了 23 μm 的位移幅度。然而,振幅在 15 Hz 时下降到 10-13 μm,略高于人类感知极限
更新日期:2020-04-01
中文翻译:
用于大功率 MEMS 触觉显示器的带有偏置弹簧的 SMA 薄膜致动器阵列的制造和表征
摘要 设计并制造了间距为2 mm的MEMS型SMA厚膜致动器(5×5阵列),用于对人体皮肤进行大功率振动刺激。SMA 致动器的可变形部分 (1.08 mm × 1.52 mm) 最初变形为 320 μm 以提供振动运动。当 SMA 致动器偏转至初始位移 (320 μm) 时,SMA 致动器装置在 SMA 曲折致动器和微型加热器电路中成功制造而没有断裂。通过对 SMA 的高脉冲电压加热 (32 V),曲折形 SMA 致动器的表面温度在短时间内成功升至约 65 °C,即形状恢复温度。然而,发现由于热传导不良,需要超过 99 ms 的冷却时间才能完全冷却。尽管 SMA 执行器通过直流电流加热 (~72 mW) 产生了 38-40 mN 的力,但通过 15 Hz 以上的周期性脉冲驱动,人类皮肤具有很高的敏感性,但由于较差的性能,产生的力急剧下降了 1/4。脉冲关闭期间的热响应。带有偏置弹簧机构的完整 SMA 触觉显示器在 1 Hz 的频率下产生了 23 μm 的位移幅度。然而,振幅在 15 Hz 时下降到 10-13 μm,略高于人类感知极限








































 京公网安备 11010802027423号
京公网安备 11010802027423号