ISPRS Journal of Photogrammetry and Remote Sensing ( IF 10.6 ) Pub Date : 2020-04-11 , DOI: 10.1016/j.isprsjprs.2020.03.021 Eric Hyyppä , Juha Hyyppä , Teemu Hakala , Antero Kukko , Michael A. Wulder , Joanne C. White , Jiri Pyörälä , Xiaowei Yu , Yunsheng Wang , Juho-Pekka Virtanen , Onni Pohjavirta , Xinlian Liang , Markus Holopainen , Harri Kaartinen
|
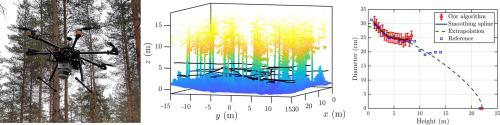
Surveying and robotic technologies are converging, offering great potential for robotic-assisted data collection and support for labour intensive surveying activities. From a forest monitoring perspective, there are several technological and operational aspects to address concerning under-canopy flying unmanned airborne vehicles (UAV). To demonstrate this emerging technology, we investigated tree detection and stem curve estimation using laser scanning data obtained with an under-canopy flying UAV. To this end, we mounted a Kaarta Stencil-1 laser scanner with an integrated simultaneous localization and mapping (SLAM) system on board an UAV that was manually piloted with the help of video goggles receiving a live video feed from the onboard camera of the UAV. Using the under-canopy flying UAV, we collected SLAM-corrected point cloud data in a boreal forest on two 32 m 32 m test sites that were characterized as sparse ( = 42 trees) and obstructed ( = 43 trees), respectively. Novel data processing algorithms were applied for the point clouds in order to detect the stems of individual trees and to extract their stem curves and diameters at breast height (DBH). The estimated tree attributes were compared against highly accurate field reference data that was acquired semi-manually with a multi-scan terrestrial laser scanner (TLS). The proposed method succeeded in detecting 93% of the stems in the sparse plot and 84% of the stems in the obstructed plot. In the sparse plot, the DBH and stem curve estimates had a root-mean-squared error (RMSE) of 0.60 cm (2.2%) and 1.2 cm (5.0%), respectively, whereas the corresponding values for the obstructed plot were 0.92 cm (3.1%) and 1.4 cm (5.2%). By combining the stem curves extracted from the under-canopy UAV laser scanning data with tree heights derived from above-canopy UAV laser scanning data, we computed stem volumes for the detected trees with a relative RMSE of 10.1% in both plots. Thus, the combination of under-canopy and above-canopy UAV laser scanning allowed us to extract the stem volumes with an accuracy comparable to the past best studies based on TLS in boreal forest conditions. Since the stems of several spruces located on the test sites suffered from severe occlusion and could not be detected with the stem-based method, we developed a separate work flow capable of detecting trees with occluded stems. The proposed work flow enabled us to detect 98% of trees in the sparse plot and 93% of the trees in the obstructed plot with a 100% correction level in both plots. A key benefit provided by the under-canopy UAV laser scanner is the short period of time required for data collection, currently demonstrated to be much faster than the time required for field measurements and TLS. The quality of the measurements acquired with the under-canopy flying UAV combined with the demonstrated efficiency indicates operational potential for supporting fast and accurate forest resource inventories.
中文翻译:
冠下无人机激光扫描,可进行准确的林地测量
测量和机器人技术正在融合,为机器人辅助数据收集和为劳动密集型测量活动提供支持提供了巨大潜力。从森林监测的角度来看,有几个技术和操作方面需要解决有关机盖下飞行的无人机的问题。为了证明这一新兴技术,我们使用树冠下飞行无人机获得的激光扫描数据研究了树木检测和茎曲线估计。为此,我们在无人飞行器上安装了带有集成同时定位和制图(SLAM)系统的Kaarta Stencil-1激光扫描仪,该系统通过视频护目镜从无人机的机载摄像头接收实时视频信号进行手动驾驶。使用遮篷下飞行的无人机, 特征为稀疏的32 m个测试站点( = 42棵树)并受阻(= 43棵树)。将新颖的数据处理算法应用于点云,以检测单个树木的茎,并提取它们的茎曲线和胸高(DBH)处的直径。将估计的树属性与通过多扫描地面激光扫描仪(TLS)半手动获取的高精度现场参考数据进行比较。所提出的方法成功地检测了稀疏地块中的93%的茎和阻塞地块中的84%的茎。在稀疏图中,DBH和茎曲线估计的均方根误差(RMSE)分别为0.60 cm(2.2%)和1.2 cm(5.0%),而阻塞图的相应值为0.92 cm (3.1%)和1.4厘米(5.2%)。通过组合从树冠下无人机激光扫描数据提取的茎曲线与从树冠上无人机激光扫描数据得出的树高,我们在两个图中计算了相对于RMSE为10.1%的被检测树木的茎体积。因此,冠层下无人机和冠层上无人机激光扫描的结合使我们能够以与以往基于北方森林条件下基于TLS的最佳研究相当的精度提取茎体积。由于位于测试位置的数个云杉的茎遭受严重的阻塞,因此无法使用基于茎的方法检测到,因此,我们开发了一个单独的工作流程,能够检测具有阻塞的茎的树木。拟议的工作流程使我们能够在稀疏地块中检测98%的树木,在阻塞地块中检测93%的树木,并且两个地块的校正水平均为100%。机盖下无人机激光扫描仪提供的主要优势是数据收集所需的时间很短,目前已证明比实地测量和TLS所需的时间要快得多。冠层下飞行的无人机获得的测量质量与已证明的效率相结合,表明了支持快速准确的森林资源清单的业务潜力。










































 京公网安备 11010802027423号
京公网安备 11010802027423号