当前位置:
X-MOL 学术
›
Rob. Auton. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A new approach for the estimation of non-cooperative satellites based on circular feature extraction
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.robot.2020.103532 Yang Liu , Zongwu Xie , Qi Zhang , Xiaoyu Zhao , Hong Liu
Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2020-07-01 , DOI: 10.1016/j.robot.2020.103532 Yang Liu , Zongwu Xie , Qi Zhang , Xiaoyu Zhao , Hong Liu
|
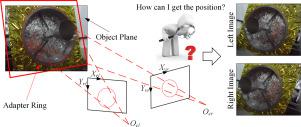
Abstract Pose estimation of non-cooperative satellites has been a hot topic in the study of astronautics as the visual feedback will highly enhance the safety of on-orbit services. A stereo vision system is proposed in this paper. It works as an eye-to-hand vision camera in the final approach phase Based on circular feature extraction, a closed-form solution is presented. The position and orientation of the adapter ring can be figured out in real-time as well as the unknown radius. Neither additional sensors nor prior knowledge is required, and the orientation-duality problem has been solved. It works well on the partial ellipses and is robust to outliers, noise and occlusions. Experimental results on both synthetic and real images have demonstrated the effectiveness and efficiency of the proposed method.
中文翻译:

一种基于圆形特征提取的非合作卫星估计新方法
摘要 非合作卫星的位姿估计一直是航天研究的热点,其视觉反馈将极大地提高在轨服务的安全性。本文提出了一种立体视觉系统。它在最终接近阶段用作眼手视觉相机。基于圆形特征提取,提出了一种封闭形式的解决方案。可以实时计算出适配环的位置和方向以及未知半径。既不需要额外的传感器也不需要先验知识,并且方向二元性问题已经解决。它适用于部分椭圆,并且对异常值、噪声和遮挡具有鲁棒性。在合成图像和真实图像上的实验结果都证明了所提出方法的有效性和效率。
更新日期:2020-07-01
中文翻译:
一种基于圆形特征提取的非合作卫星估计新方法
摘要 非合作卫星的位姿估计一直是航天研究的热点,其视觉反馈将极大地提高在轨服务的安全性。本文提出了一种立体视觉系统。它在最终接近阶段用作眼手视觉相机。基于圆形特征提取,提出了一种封闭形式的解决方案。可以实时计算出适配环的位置和方向以及未知半径。既不需要额外的传感器也不需要先验知识,并且方向二元性问题已经解决。它适用于部分椭圆,并且对异常值、噪声和遮挡具有鲁棒性。在合成图像和真实图像上的实验结果都证明了所提出方法的有效性和效率。










































 京公网安备 11010802027423号
京公网安备 11010802027423号