当前位置:
X-MOL 学术
›
Comput. Graph. Forum
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Muscle and Fascia Simulation with Extended Position Based Dynamics
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2019-05-27 , DOI: 10.1111/cgf.13734 M. Romeo 1 , C. Monteagudo 1 , D. Sánchez‐Quirós 1
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2019-05-27 , DOI: 10.1111/cgf.13734 M. Romeo 1 , C. Monteagudo 1 , D. Sánchez‐Quirós 1
Affiliation
|
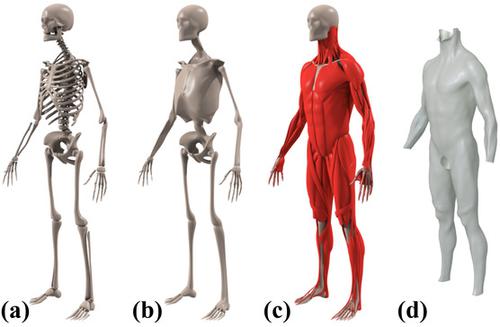
Recent research on muscle and fascia simulation for visual effects relies on numerical methods such as the finite element method or finite volume method. These approaches produce realistic results, but require high computational time and are complex to set up. On the other hand, position‐based dynamics offers a fast and controllable solution to simulate surfaces and volumes, but there is no literature on how to implement constraints that could be used to realistically simulate muscles and fascia for digital creatures with this method. In this paper, we extend the current state‐of‐the‐art in Position‐Based Dynamics to efficiently compute realistic skeletal muscle and superficial fascia simulation. In particular, we embed muscle fibres in the solver by adding an anisotropic component to the distance constraints between mesh points and apply overpressure to realistically model muscle volume changes under contraction. In addition, we also define a modified distance constraint for the fascia that allows compression and enables the user to scale the constraint's original distance to gain elastic potential at rest. Finally, we propose a modification of the extended position‐based dynamics algorithm to properly compute different sets of constraints and describe other details for proper simulation of character's muscle and fascia dynamics.
中文翻译:

肌肉和筋膜模拟与基于扩展位置的动力学
最近关于视觉效果的肌肉和筋膜模拟的研究依赖于数值方法,例如有限元方法或有限体积方法。这些方法产生逼真的结果,但需要大量计算时间并且设置复杂。另一方面,基于位置的动力学提供了一种快速且可控的解决方案来模拟表面和体积,但没有关于如何实现可用于使用这种方法真实模拟数字生物的肌肉和筋膜的约束的文献。在本文中,我们扩展了当前最先进的基于位置的动力学,以有效计算逼真的骨骼肌和浅筋膜模拟。特别是,我们通过向网格点之间的距离约束添加各向异性分量并应用超压来真实地模拟收缩下的肌肉体积变化,从而在求解器中嵌入肌肉纤维。此外,我们还为筋膜定义了一个修改的距离约束,它允许压缩并使用户能够缩放约束的原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。s 原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。s 原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。
更新日期:2019-05-27
中文翻译:
肌肉和筋膜模拟与基于扩展位置的动力学
最近关于视觉效果的肌肉和筋膜模拟的研究依赖于数值方法,例如有限元方法或有限体积方法。这些方法产生逼真的结果,但需要大量计算时间并且设置复杂。另一方面,基于位置的动力学提供了一种快速且可控的解决方案来模拟表面和体积,但没有关于如何实现可用于使用这种方法真实模拟数字生物的肌肉和筋膜的约束的文献。在本文中,我们扩展了当前最先进的基于位置的动力学,以有效计算逼真的骨骼肌和浅筋膜模拟。特别是,我们通过向网格点之间的距离约束添加各向异性分量并应用超压来真实地模拟收缩下的肌肉体积变化,从而在求解器中嵌入肌肉纤维。此外,我们还为筋膜定义了一个修改的距离约束,它允许压缩并使用户能够缩放约束的原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。s 原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。s 原始距离以获得静止时的弹性潜力。最后,我们提出了扩展基于位置的动力学算法的修改,以正确计算不同的约束集并描述其他细节,以正确模拟角色的肌肉和筋膜动力学。










































 京公网安备 11010802027423号
京公网安备 11010802027423号