当前位置:
X-MOL 学术
›
Comput. Graph. Forum
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
PointCleanNet : Learning to Denoise and Remove Outliers from Dense Point Clouds
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2019-06-25 , DOI: 10.1111/cgf.13753 Marie‐Julie Rakotosaona 1 , Vittorio La Barbera 2 , Paul Guerrero 2 , Niloy J. Mitra 2 , Maks Ovsjanikov 1
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2019-06-25 , DOI: 10.1111/cgf.13753 Marie‐Julie Rakotosaona 1 , Vittorio La Barbera 2 , Paul Guerrero 2 , Niloy J. Mitra 2 , Maks Ovsjanikov 1
Affiliation
|
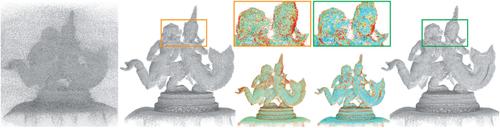
Point clouds obtained with 3D scanners or by image‐based reconstruction techniques are often corrupted with significant amount of noise and outliers. Traditional methods for point cloud denoising largely rely on local surface fitting (e.g. jets or MLS surfaces), local or non‐local averaging or on statistical assumptions about the underlying noise model. In contrast, we develop a simple data‐driven method for removing outliers and reducing noise in unordered point clouds. We base our approach on a deep learning architecture adapted from PCPNet, which was recently proposed for estimating local 3D shape properties in point clouds. Our method first classifies and discards outlier samples, and then estimates correction vectors that project noisy points onto the original clean surfaces. The approach is efficient and robust to varying amounts of noise and outliers, while being able to handle large densely sampled point clouds. In our extensive evaluation, both on synthetic and real data, we show an increased robustness to strong noise levels compared to various state‐of‐the‐art methods, enabling accurate surface reconstruction from extremely noisy real data obtained by range scans. Finally, the simplicity and universality of our approach makes it very easy to integrate in any existing geometry processing pipeline. Both the code and pre‐trained networks can be found on the project page (https://github.com/mrakotosaon/pointcleannet).
中文翻译:

PointCleanNet:学习从密集点云中去噪和去除异常值
使用 3D 扫描仪或基于图像的重建技术获得的点云通常会被大量噪声和异常值破坏。传统的点云去噪方法在很大程度上依赖于局部表面拟合(例如喷射或 MLS 表面)、局部或非局部平均或基于关于底层噪声模型的统计假设。相比之下,我们开发了一种简单的数据驱动方法来去除无序点云中的异常值和减少噪声。我们的方法基于改编自 PCPNet 的深度学习架构,该架构最近被提议用于估计点云中的局部 3D 形状属性。我们的方法首先对异常样本进行分类和丢弃,然后估计将噪声点投射到原始干净表面上的校正向量。该方法对不同数量的噪声和异常值有效且稳健,同时能够处理大型密集采样点云。在我们对合成数据和真实数据的广泛评估中,与各种最先进的方法相比,我们对强噪声水平的鲁棒性有所提高,从而能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。与各种最先进的方法相比,我们对强噪声水平表现出更高的鲁棒性,能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。与各种最先进的方法相比,我们对强噪声水平表现出更高的鲁棒性,能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。
更新日期:2019-06-25
中文翻译:
PointCleanNet:学习从密集点云中去噪和去除异常值
使用 3D 扫描仪或基于图像的重建技术获得的点云通常会被大量噪声和异常值破坏。传统的点云去噪方法在很大程度上依赖于局部表面拟合(例如喷射或 MLS 表面)、局部或非局部平均或基于关于底层噪声模型的统计假设。相比之下,我们开发了一种简单的数据驱动方法来去除无序点云中的异常值和减少噪声。我们的方法基于改编自 PCPNet 的深度学习架构,该架构最近被提议用于估计点云中的局部 3D 形状属性。我们的方法首先对异常样本进行分类和丢弃,然后估计将噪声点投射到原始干净表面上的校正向量。该方法对不同数量的噪声和异常值有效且稳健,同时能够处理大型密集采样点云。在我们对合成数据和真实数据的广泛评估中,与各种最先进的方法相比,我们对强噪声水平的鲁棒性有所提高,从而能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。与各种最先进的方法相比,我们对强噪声水平表现出更高的鲁棒性,能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。与各种最先进的方法相比,我们对强噪声水平表现出更高的鲁棒性,能够从距离扫描获得的极其嘈杂的真实数据中进行准确的表面重建。最后,我们方法的简单性和通用性使其很容易集成到任何现有的几何处理管道中。代码和预训练网络都可以在项目页面 (https://github.com/mrakotosaon/pointcleannet) 上找到。










































 京公网安备 11010802027423号
京公网安备 11010802027423号