Environmental Modelling & Software ( IF 4.9 ) Pub Date : 2020-03-19 , DOI: 10.1016/j.envsoft.2020.104701 Asaf Nebenzal , Barak Fishbain , Shai Kendler
|
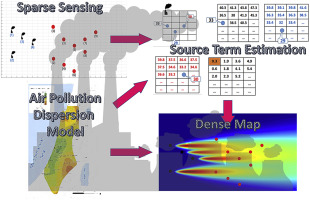
A method for producing dense air pollution maps, based on any given air-pollution dispersion model, is presented. The scheme consists of two phases. At the first stage, sources' locations and emission rates, i.e., source term estimation, as a function of the model's parameter space are sought (“backward computation”). Then, the source term is used to generate the dense maps utilizing the same dispersion model (“forward computation”). The algorithm is model-invariant to the dispersion model, and thus is suitable for a wide range of applications according to the required accuracy and available resources. A simulation of an industrial area demonstrated that this method produced more accurate maps than current state-of-the-art techniques. The resulting dense air pollution map is thus a valuable tool for air pollution mitigation, regulation and research.
中文翻译:
多源场景中基于稀疏感知的基于模型的密集空气污染图
提出了一种基于任何给定的空气污染扩散模型生成密集的空气污染图的方法。该计划分为两个阶段。在第一阶段,寻求源位置和排放速率,即源项估计,作为模型参数空间的函数(“后向计算”)。然后,将源项用于利用相同的色散模型生成密集图(“正向计算”)。该算法对于色散模型是模型不变的,因此根据所需的精度和可用资源,它适合于广泛的应用。对工业领域的仿真表明,与当前的最新技术相比,此方法可生成更准确的地图。因此,生成的密集的空气污染图是缓解,调节和研究空气污染的宝贵工具。


























 京公网安备 11010802027423号
京公网安备 11010802027423号