Computer-Aided Design ( IF 3.0 ) Pub Date : 2020-02-28 , DOI: 10.1016/j.cad.2020.102828 Ellips Masehian , Somayé Ghandi
|
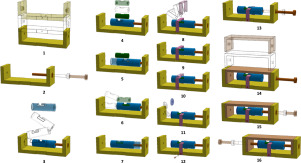
The Assembly Sequence and Path Planning (ASPP) problem concerns with computing a sequence of assembly motions for constituent parts of an assembled final product while finding collision-free and short paths for parts from their initial location to their final position. ASPP is a challenging problem due to being NP-hard, and is an important subproblem of the Assembly Planning problem, which is encountered frequently in the manufacturing industry and takes up more than half of the total production time. In this paper, a new method called Assembly Sequence and Path Planner/Replanner (ASPPR) is presented to solve the ASPP problem. ASPPR has a sequence-planning component, which is a simple greedy heuristic that in each iteration tries to locally minimize geometric interferences between parts being assembled along the main directions, and a path-planning component, which employs a sampling-based stochastic path planner to plan short paths for parts while avoiding workspace obstacles. Thanks to its replanning feature, the ASPPR method is able to identify and resolve cases where already-assembled parts impede the movements of subsequent parts. While majority of the methods in the literature deal with monotone problems in workspaces without obstacles, the proposed method has the advantage of considering obstacles in the workspace, allowing planning translational and rotational movements for parts, and handling nonmonotone assembly sequence plans, in which the parts need to be relocated to one or more intermediate positions before moving to their final assembled position. To test and measure the effectiveness of the ASPPR, eight problems (a mixture of monotone and non-monotone, in 2D and 3D, and benchmark and new) were solved with five different sampling-based algorithms (three existing and two new) in the path planning component, and the results of 30 runs for each case were thoroughly compared and analyzed. Analytical and statistical analyses showed that our newly proposed unidirectional and bidirectional variants of the original unidirectional and bidirectional Rapidly Exploring Random Trees (RRT) outperformed other planners in the Total Path Length, Total Number of Nodes, Total Number of Edges, Total Number of Collision Checks, and Total Time performance criteria.
中文翻译:
ASPPR:用于单调和非单调装配计划的新装配顺序和路径计划器/重新计划器
装配顺序和路径规划(ASPP)问题涉及为已装配的最终产品的组成部分计算装配运动的顺序,同时找到从零件的初始位置到最终位置的无碰撞和短路径。ASPP由于是NP难题而成为一个具有挑战性的问题,并且是装配计划问题的重要子问题,该问题在制造业中经常遇到,并且占总生产时间的一半以上。在本文中,提出了一种称为装配顺序和路径规划器/重新规划器(ASPPR)的新方法来解决ASPP问题。ASPPR具有序列计划组件,这是一种简单的贪婪启发式方法,它在每次迭代中都试图将沿主方向组装的零件之间的几何干扰最小化,路径规划组件,它使用基于采样的随机路径规划器来规划零件的短路径,同时避免工作空间的障碍。由于具有重新计划功能,ASPPR方法能够识别和解决已组装零件妨碍后续零件移动的情况。尽管文献中的大多数方法都是在无障碍的工作空间中处理单调问题,但所提出的方法具有以下优点:考虑工作空间中的障碍,允许计划零件的平移和旋转运动,以及处理零件的非单调装配顺序计划需要先移到一个或多个中间位置,然后再移动到最终组装位置。为了测试和衡量ASPPR的有效性,需要解决八个问题(单调和非单调的混合,在路径规划组件中使用五种不同的基于采样的算法(现有的三种和两种新的)解决了2D和3D以及基准测试和新算法)中的问题,并对每种情况下的30次运行结果进行了彻底的比较和分析。分析和统计分析表明,我们新提出的原始单向和双向快速探索随机树(RRT)的单向和双向变体在总路径长度,节点总数,边总数,碰撞检查总数方面胜过其他计划者,以及“总时间”效果标准。










































 京公网安备 11010802027423号
京公网安备 11010802027423号