当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Paper Robotics: Self‐Folding, Gripping, and Locomotion
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-02-25 , DOI: 10.1002/admt.201901054 Jihyun Ryu 1 , Maedeh Mohammadifar 1 , Mehdi Tahernia 1 , Ha‐ill Chun 1 , Yang Gao 1 , Seokheun Choi 1
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-02-25 , DOI: 10.1002/admt.201901054 Jihyun Ryu 1 , Maedeh Mohammadifar 1 , Mehdi Tahernia 1 , Ha‐ill Chun 1 , Yang Gao 1 , Seokheun Choi 1
Affiliation
|
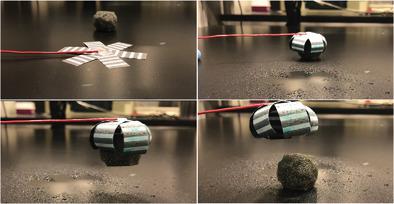
Soft robotics driven by origami can fundamentally advance robotic functionalities by significantly improving continuum, compliance, and configurability. Here, a new field is proposed, “paper robotics,” which is based on moisture‐responsive self‐folding of paper substrates into functional 3D machines using origami‐inspired techniques. By properly designing a hydrophobic wax layer and a hygro‐expandable hydrophilic layer, printed bilayer paper will fold automatically into desired shapes through anisotropic swelling that occurs when water is sprayed on the structure. The bilayer actuators can be readily fabricated on paper by the asymmetrical penetration of wax that is printed on both sides of the paper. The patterned paper automatically folds when water is added and unfolds as the water evaporates. The structure can perform various mechanical functions, including gripping and biomimetic locomotion. One of the practical applications, a kirigami paper robotic finger as an electrical switch, is also demonstrated. The functional mechanism based on the swelling and shrinking properties of paper is modeled and critical parameters for the design of the bilayer actuation are thoroughly characterized. This work will be a starting point for paper robotics and open new avenues to merge soft robotics and origami techniques.
中文翻译:

纸张机器人:自折叠,抓握和移动
由折纸驱动的软机器人可以通过显着改善连续性,合规性和可配置性来从根本上提高机器人的功能。在此,提出了一个新的领域,即“纸张机器人技术”,该领域基于使用折纸启发的技术将纸张基材的湿度响应性自折叠到功能性3D机器中。通过适当设计疏水蜡层和可湿膨胀的亲水层,印刷的双层纸将通过在结构上喷水时发生的各向异性溶胀而自动折叠成所需的形状。通过打印在纸张两面上的蜡的不对称渗透,可以轻松地在纸上制造双层执行器。加水后,有图案的纸会自动折叠,并随着水的蒸发而展开。该结构可以执行各种机械功能,包括抓握和仿生运动。还演示了一种实际应用,即作为电气开关的kirigami纸机器人手指。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。
更新日期:2020-02-25
中文翻译:
纸张机器人:自折叠,抓握和移动
由折纸驱动的软机器人可以通过显着改善连续性,合规性和可配置性来从根本上提高机器人的功能。在此,提出了一个新的领域,即“纸张机器人技术”,该领域基于使用折纸启发的技术将纸张基材的湿度响应性自折叠到功能性3D机器中。通过适当设计疏水蜡层和可湿膨胀的亲水层,印刷的双层纸将通过在结构上喷水时发生的各向异性溶胀而自动折叠成所需的形状。通过打印在纸张两面上的蜡的不对称渗透,可以轻松地在纸上制造双层执行器。加水后,有图案的纸会自动折叠,并随着水的蒸发而展开。该结构可以执行各种机械功能,包括抓握和仿生运动。还演示了一种实际应用,即作为电气开关的kirigami纸机器人手指。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。对基于纸张膨胀和收缩特性的功能机理进行了建模,并对双层驱动设计的关键参数进行了全面表征。这项工作将成为纸张机器人技术的起点,并为融合软机器人技术和折纸技术开辟新的途径。










































 京公网安备 11010802027423号
京公网安备 11010802027423号