Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A Lesson from Plants: High-Speed Soft Robotic Actuators.
Advanced Science ( IF 14.3 ) Pub Date : 2020-01-21 , DOI: 10.1002/advs.201903391 Richard Baumgartner 1 , Alexander Kogler 1 , Josef M Stadlbauer 1, 2 , Choon Chiang Foo 3 , Rainer Kaltseis 1 , Melanie Baumgartner 1, 2, 4 , Guoyong Mao 2 , Christoph Keplinger 5, 6 , Soo Jin Adrian Koh 7 , Nikita Arnold 2 , Zhigang Suo 8 , Martin Kaltenbrunner 1, 2 , Siegfried Bauer 1
Advanced Science ( IF 14.3 ) Pub Date : 2020-01-21 , DOI: 10.1002/advs.201903391 Richard Baumgartner 1 , Alexander Kogler 1 , Josef M Stadlbauer 1, 2 , Choon Chiang Foo 3 , Rainer Kaltseis 1 , Melanie Baumgartner 1, 2, 4 , Guoyong Mao 2 , Christoph Keplinger 5, 6 , Soo Jin Adrian Koh 7 , Nikita Arnold 2 , Zhigang Suo 8 , Martin Kaltenbrunner 1, 2 , Siegfried Bauer 1
Affiliation
|
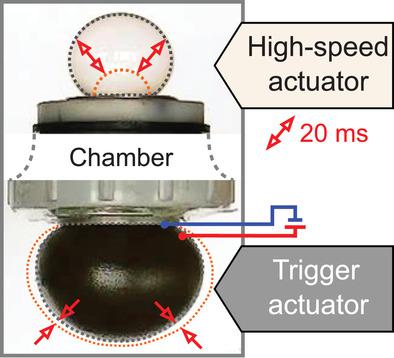
Rapid energy-efficient movements are one of nature's greatest developments. Mechanisms like snap-buckling allow plants like the Venus flytrap to close the terminal lobes of their leaves at barely perceptible speed. Here, a soft balloon actuator is presented, which is inspired by such mechanical instabilities and creates safe, giant, and fast deformations. The basic design comprises two inflated elastomer membranes pneumatically coupled by a pressurized chamber of suitable volume. The high-speed actuation of a rubber balloon in a state close to the verge of mechanical instability is remotely triggered by a voltage-controlled dielectric elastomer membrane. This method spatially separates electrically active and passive parts, and thereby averts electrical breakdown resulting from the drastic thinning of an electroactive membrane during large expansion. Bistable operation with small and large volumes of the rubber balloon is demonstrated, achieving large volume changes of 1398% and a high-speed area change rate of 2600 cm2 s-1. The presented combination of fast response time with large deformation and safe handling are central aspects for a new generation of soft bio-inspired robots and can help pave the way for applications ranging from haptic displays to soft grippers and high-speed sorting machines.
中文翻译:

植物的教训:高速软机器人执行器。
快速节能运动是大自然最伟大的发展之一。像卡扣弯曲这样的机制使得像捕蝇草这样的植物能够以几乎无法察觉的速度关闭叶子的末端裂片。这里提出了一种软气球致动器,它受到这种机械不稳定性的启发,并产生安全、巨大和快速的变形。基本设计包括两个充气弹性体膜,通过适当体积的加压室气动连接。处于接近机械不稳定边缘状态的橡胶气球的高速驱动是由电压控制的介电弹性体膜远程触发的。该方法在空间上分离电活性部分和无源部分,从而避免电活性膜在大膨胀期间急剧变薄而导致电击穿。演示了小体积和大体积橡胶气球的双稳态操作,实现了 1398% 的大体积变化和 2600 cm2 s-1 的高速面积变化率。所提出的快速响应时间与大变形和安全操作的结合是新一代软仿生机器人的核心方面,可以帮助为从触觉显示器到软夹具和高速分拣机等应用铺平道路。
更新日期:2020-01-22
中文翻译:
植物的教训:高速软机器人执行器。
快速节能运动是大自然最伟大的发展之一。像卡扣弯曲这样的机制使得像捕蝇草这样的植物能够以几乎无法察觉的速度关闭叶子的末端裂片。这里提出了一种软气球致动器,它受到这种机械不稳定性的启发,并产生安全、巨大和快速的变形。基本设计包括两个充气弹性体膜,通过适当体积的加压室气动连接。处于接近机械不稳定边缘状态的橡胶气球的高速驱动是由电压控制的介电弹性体膜远程触发的。该方法在空间上分离电活性部分和无源部分,从而避免电活性膜在大膨胀期间急剧变薄而导致电击穿。演示了小体积和大体积橡胶气球的双稳态操作,实现了 1398% 的大体积变化和 2600 cm2 s-1 的高速面积变化率。所提出的快速响应时间与大变形和安全操作的结合是新一代软仿生机器人的核心方面,可以帮助为从触觉显示器到软夹具和高速分拣机等应用铺平道路。










































 京公网安备 11010802027423号
京公网安备 11010802027423号