Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2020-01-21 , DOI: 10.1016/j.sna.2020.111853 Yee Jher Chan , Adam R. Carr , Sadaf Charkhabi , Mason Furnish , Andee M. Beierle , Nigel F. Reuel
|
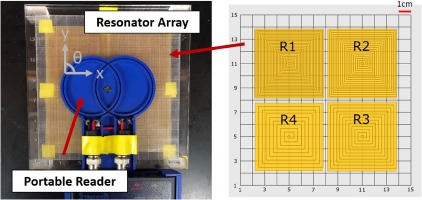
In this work, four square, planar resonators with unique frequency windows were used to form a 2 by 2 array for wireless position determination and normalization of position-dependent, embedded resonant sensors. First, a master table of S|21| gain and phase data was collected at 8100 positions. Automated scripts extracted the characteristic gain and phase peaks and used cubic interpolation to expand the master table to 7,157,160 unique angle and coordinate positions. An unknown position is then determined by comparing its S|21| measurements to this table. To further improve the position accuracy, multiple measurements are collected on linear flyby trajectories. The average and standard deviation of predicted position offset from true value using this method were 3.2 and 2.3 mm, respectively. To test normalization of a position dependent sensor, a spiral resonant sensor was placed underneath the square array. The sensor signal was modulated using varying amounts of water on the sensor surface. A corrected reading was determined using four different flyby trajectories using the position array data to adjust the signal based on position. We found that average errors of the normalized signals were between 0.04 to 0.15 MHz at lower water volume (0.5 mL) and -0.53 to -0.74 MHz at higher water volume (2.0 mL). In its current state, the positional array can be used for asset tracking or feedback control and the sensor normalization can be used to improve the measurement accuracy of embedded sensors. This technique can be further improved by collecting more accurate master calibration data using an automated system.
中文翻译:
使用谐振器阵列的无线位置感测和嵌入式谐振传感器的标准化
在这项工作中,四个具有独特频率窗口的方形平面谐振器被用于形成一个2 x 2阵列,用于无线位置确定和位置相关的嵌入式谐振传感器的规范化。首先,主表S | 21 | 在8100个位置收集了增益和相位数据。自动化脚本提取了特征增益和相位峰值,并使用三次插值将主表扩展到7,157,160个唯一的角度和坐标位置。然后通过比较其S | 21 |确定未知位置。此表的尺寸。为了进一步提高位置精度,在线性飞越轨迹上收集了多个测量值。使用此方法预测的偏离真实值的位置的平均偏差和标准偏差分别为3.2和2.3 mm。为了测试位置相关传感器的规格化,在方形阵列下方放置了一个螺旋共振传感器。使用传感器表面上不同量的水调制传感器信号。使用位置阵列数据基于位置调整信号的四个不同的飞越轨迹来确定校正后的读数。我们发现归一化信号的平均误差在较低水量(0.5 mL)时为0.04至0.15 MHz,而在较高水量(2.0 mL)时为-0.53至-0.74 MHz。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器标准化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。使用传感器表面上不同量的水调制传感器信号。使用位置阵列数据基于位置调整信号的四个不同的飞越轨迹来确定校正后的读数。我们发现归一化信号的平均误差在较低水量(0.5 mL)时为0.04至0.15 MHz,而在较高水量(2.0 mL)时为-0.53至-0.74 MHz。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。使用传感器表面上不同量的水调制传感器信号。使用位置阵列数据基于位置调整信号的四个不同的飞越轨迹来确定校正后的读数。我们发现归一化信号的平均误差在较低水量(0.5 mL)时为0.04至0.15 MHz,而在较高水量(2.0 mL)时为-0.53至-0.74 MHz。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。使用位置阵列数据基于位置调整信号的四个不同的飞越轨迹来确定校正后的读数。我们发现归一化信号的平均误差在较低水量(0.5 mL)时为0.04至0.15 MHz,而在较高水量(2.0 mL)时为-0.53至-0.74 MHz。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。使用位置阵列数据基于位置调整信号的四个不同的飞越轨迹来确定校正后的读数。我们发现归一化信号的平均误差在较低水量(0.5 mL)时为0.04至0.15 MHz,而在较高水量(2.0 mL)时为-0.53至-0.74 MHz。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。0 mL)。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。0 mL)。在其当前状态下,位置阵列可用于资产跟踪或反馈控制,并且传感器归一化可用于提高嵌入式传感器的测量精度。通过使用自动化系统收集更准确的主校准数据,可以进一步改进此技术。








































 京公网安备 11010802027423号
京公网安备 11010802027423号