当前位置:
X-MOL 学术
›
Opt. Express
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Geometric calibration for LiDAR-camera system fusing 3D-2D and 3D-3D point correspondences.
Optics Express ( IF 3.2 ) Pub Date : 2020-01-20 , DOI: 10.1364/oe.381176 Pei An , Tao Ma , Kun Yu , Bin Fang , Jun Zhang , Wenxing Fu , Jie Ma
Optics Express ( IF 3.2 ) Pub Date : 2020-01-20 , DOI: 10.1364/oe.381176 Pei An , Tao Ma , Kun Yu , Bin Fang , Jun Zhang , Wenxing Fu , Jie Ma
|
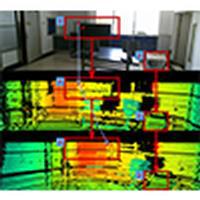
Calibrating the extrinsic parameters on a system of 3D Light Detection And Ranging (LiDAR) and the monocular camera is a challenging task, because accurate 3D-2D or 3D-3D point correspondences are hard to establish from the sparse LiDAR point clouds in the calibration procedure. In this paper, we propose a geometric calibration method for estimating the extrinsic parameters of the LiDAR-camera system. In this method, a novel combination of planar boards with chessboard patterns and auxiliary calibration objects are proposed. The planar chessboard provides 3D-2D and 3D-3D point correspondences. Auxiliary calibration objects provide extra constraints for stable calibration results. After that, a novel geometric optimization framework is proposed to utilize these point correspondences, thus leading calibration results robust to LiDAR sensor noise. Besides, we contribute an automatic approach to extract point clouds of calibration objects. In the experiments, our method has a superior performance over state-of-the-art calibration methods. Furthermore, we verify our method by computing depth map and improvements can also be found. These results demonstrate that our method performance on the LiDAR-camera system is applicable for future advanced visual applications.
中文翻译:

融合3D-2D和3D-3D点对应关系的LiDAR相机系统的几何校准。
在3D光检测和测距(LiDAR)系统和单眼相机上校准外部参数是一项艰巨的任务,因为在校准过程中很难从稀疏的LiDAR点云中建立准确的3D-2D或3D-3D点对应关系。在本文中,我们提出了一种几何标定方法来估计LiDAR相机系统的外部参数。在这种方法中,提出了具有棋盘图案的平面板和辅助校准对象的新颖组合。平面棋盘提供3D-2D和3D-3D点对应。辅助校准对象为稳定的校准结果提供了额外的约束。之后,提出了一种新颖的几何优化框架来利用这些点对应关系,从而导致对LiDAR传感器噪声具有鲁棒性的校准结果。此外,我们提供了一种自动方法来提取校准对象的点云。在实验中,我们的方法具有优于最新校准方法的性能。此外,我们通过计算深度图验证了我们的方法,并且也可以找到改进之处。这些结果表明,我们在LiDAR相机系统上的方法性能适用于未来的高级视觉应用。
更新日期:2020-01-17
中文翻译:
融合3D-2D和3D-3D点对应关系的LiDAR相机系统的几何校准。
在3D光检测和测距(LiDAR)系统和单眼相机上校准外部参数是一项艰巨的任务,因为在校准过程中很难从稀疏的LiDAR点云中建立准确的3D-2D或3D-3D点对应关系。在本文中,我们提出了一种几何标定方法来估计LiDAR相机系统的外部参数。在这种方法中,提出了具有棋盘图案的平面板和辅助校准对象的新颖组合。平面棋盘提供3D-2D和3D-3D点对应。辅助校准对象为稳定的校准结果提供了额外的约束。之后,提出了一种新颖的几何优化框架来利用这些点对应关系,从而导致对LiDAR传感器噪声具有鲁棒性的校准结果。此外,我们提供了一种自动方法来提取校准对象的点云。在实验中,我们的方法具有优于最新校准方法的性能。此外,我们通过计算深度图验证了我们的方法,并且也可以找到改进之处。这些结果表明,我们在LiDAR相机系统上的方法性能适用于未来的高级视觉应用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号