当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Smart Soft Actuators and Grippers Enabled by Self‐Powered Tribo‐Skins
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-01-13 , DOI: 10.1002/admt.201901075 Shoue Chen 1 , Yaokun Pang 1 , Hongyan Yuan 2 , Xiaobo Tan 3 , Changyong Cao 1, 3
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-01-13 , DOI: 10.1002/admt.201901075 Shoue Chen 1 , Yaokun Pang 1 , Hongyan Yuan 2 , Xiaobo Tan 3 , Changyong Cao 1, 3
Affiliation
|
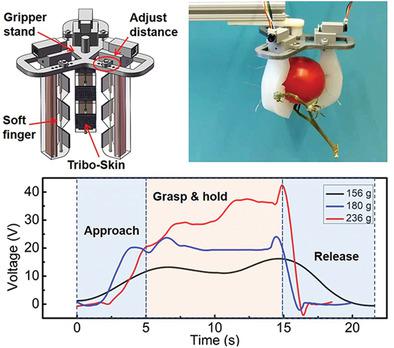
Soft end effectors or grippers capable of grasping objects dexterously and efficiently have attracted increasing attention in a broad range of applications. This article describes a smart soft finger‐like actuator with fast response, accurate control, self‐powered pressure, and bending sensing capability by combing the cable‐driven actuation with soft triboelectric nanogenerators (TENGs). The soft actuator, driven by a miniature DC motor, is designed to have multiple segments of elastomer body split with triangular cuts to facilitate the bending actuation and conformal contact with target objects. Two types of TENGs are integrated with the soft actuator: a single‐electrode‐mode TENG to measure the contact pressure and an inner contact–separation‐mode TENG to detect the bending. With micropyramid structures, the tribo‐skin patches possess high sensitivity and good compatibility with the actuator and can actively detect proximity, contact, and pressure via self‐generated electricity. Based on the modular design approach, a gripper with three fingers is fabricated and tested for its grasping, sensing, and self‐powering performance. This gripper is capable of picking up different kinds of objects, providing sensory feedback, and generating electricity, which shows great potential for use in robot–human and robot–environment interaction applications.
中文翻译:

自供电Tribo-Skins实现的智能软执行器和机械手
能够灵活有效地抓取物体的软末端执行器或抓手在广泛的应用中引起了越来越多的关注。本文介绍了通过将电缆驱动的驱动器与软摩擦纳米发电机(TENG)结合使用,具有快速响应,精确控制,自供电压力和弯曲感应功能的智能软手指式执行器。由微型直流电动机驱动的软致动器设计为具有多个弹性体,这些弹性体的主体被三角形切口分开,以利于弯曲致动和与目标物体的保形接触。软执行器集成了两种类型的TENG:一个用于测量接触压力的单电极模式TENG和一个用于检测弯曲的内部接触-分离模式TENG。具有微金字塔结构 摩擦皮贴片具有很高的灵敏度,并且与执行器具有良好的兼容性,并且可以通过自发电来主动检测接近,接触和压力。基于模块化设计方法,制造并测试了三个手指的抓具,并对其抓握,感应和自供电性能进行了测试。这种抓取器能够拾取各种物体,提供感官反馈并产生电能,这在机器人—人与机器人—环境交互应用中显示出巨大的潜力。
更新日期:2020-01-13
中文翻译:
自供电Tribo-Skins实现的智能软执行器和机械手
能够灵活有效地抓取物体的软末端执行器或抓手在广泛的应用中引起了越来越多的关注。本文介绍了通过将电缆驱动的驱动器与软摩擦纳米发电机(TENG)结合使用,具有快速响应,精确控制,自供电压力和弯曲感应功能的智能软手指式执行器。由微型直流电动机驱动的软致动器设计为具有多个弹性体,这些弹性体的主体被三角形切口分开,以利于弯曲致动和与目标物体的保形接触。软执行器集成了两种类型的TENG:一个用于测量接触压力的单电极模式TENG和一个用于检测弯曲的内部接触-分离模式TENG。具有微金字塔结构 摩擦皮贴片具有很高的灵敏度,并且与执行器具有良好的兼容性,并且可以通过自发电来主动检测接近,接触和压力。基于模块化设计方法,制造并测试了三个手指的抓具,并对其抓握,感应和自供电性能进行了测试。这种抓取器能够拾取各种物体,提供感官反馈并产生电能,这在机器人—人与机器人—环境交互应用中显示出巨大的潜力。










































 京公网安备 11010802027423号
京公网安备 11010802027423号